
米ZDNetは、iRobotの最高経営責任者(CEO)で共同創業者のColin Angle氏にインタビューを行い、ロボット掃除機「Roomba(ルンバ)」の開発をめぐる物語、そして、人々がこれほどルンバに愛着を持つ理由について、話を聞いた。
——あなたが最初に事業を始められたのは、米マサチューセッツ工科大学(MIT)で研究に取り組んでいたときのことですね。MITには、どれくらい在籍されたのですか。
Angle氏:私は学部生としてMITに入学しました。何かを作りたいという自分の情熱を満たしてくれる大学を探していました。MITでは、学部を経て大学院に進みました。そこで、ロボット工学の教授(Rodney Brooks氏)と関係を築き、彼とその後出会ったもう1人(Helen Greiner氏)の3人でiRobotを設立しました。それ以来、私はほかの仕事はしていません。
——3人がiRobotを立ち上げようと思ったきっかけは何だったのですか。
Angle氏:そのアイデアが生まれるきっかけの1つになったのは、不満からでした。ロボットについて、本で読んだり映画で観たりすることはあるのに、それらのロボットは実際には存在していませんでした。Brooks教授とHelenの主導の下、われわれはMITの研究室でマシンに知性を持たせる戦略を考え出しました。
私の学位論文のテーマは、「Genghis(ジンギス)」という6足歩行のロボットでした。Genghisはとても重要なロボットです。なぜなら、Genghisの登場以前は、歩行ロボットの開発には、スーパーコンピュータが必要とされていました。しかし、Genghisは飛行機用サーボから作られています。頭脳は8ビットマイクロプロセッサと、256バイトのRAMで構成されていました。キロバイトではなく、バイトです。
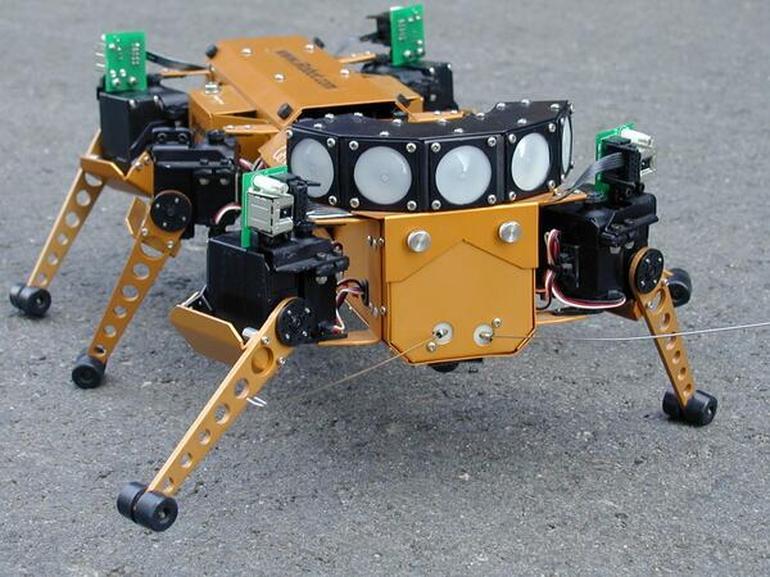
8ビットマイクロプロセッサで多数の小さなプロセスを実行できたのは、見事なまでに効率的なコードとマルチスレッドOSのおかげでした。Genghisの制御方法は、昆虫からヒントを得ています。
昆虫はとてもうまくできている生き物です。極めて小さな脳しか備わっていないにもかかわらず、複雑な環境の中を動き回ることができます。驚くべき仕組みです。
そこで、人型のロボットではなく、昆虫型のロボットを作るにはどうしたらいいか、とわれわれは考えました。そして、昆虫の知能を作り上げる戦略を生み出しました。われわれは当時、この知能を「サブサンプション・アーキテクチャ(包摂アーキテクチャ)」と呼んでいました。このアーキテクチャでは、1つのプロセスが別のプロセスを包摂することが可能で、多数の小さなプロセスを利用します。これらのプロセスを組み合わせることで、単独のプロセスではできない新たな行動を可能にします。これはとても頑丈なロボットの性質です。
この小型のクールなロボットGenghisは、起伏の多い地形をよじ登ることができました。巨大な岩を乗り越えるときもバランスを保ちましたし、ほかの歩行ロボットでは決して不可能なことも実行できました。
——つまり、Genghisには環境を認識して、計画を立てる能力があったということですか。
Angle氏:Genghisはこれといったモデルは持たず、環境を想像する能力も備わっていませんでした。ここに足を出した後、そこに足を出すべきだ、とGenghisは考えます。足の動かし方や体重の支え方、体重が十分に支えられている場合に前に進む方法については戦略を持っています。前に進めない場合は、後退して、別の経路を探します。
CNET Japanの記事を毎朝メールでまとめ読み(無料)
 心と体をたった1分で見える化
心と体をたった1分で見える化
働くあなたの心身コンディションを見守る
最新スマートウオッチが整える日常へ
 ひとごとではない生成AIの衝撃
ひとごとではない生成AIの衝撃
Copilot + PCならではのAI機能にくわえ
HP独自のAI機能がPCに変革をもたらす
 プライバシーを守って空間を変える
プライバシーを守って空間を変える
ドコモビジネス×海外発スタートアップ
共創で生まれた“使える”人流解析とは

 メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
 なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
 AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
 パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
 野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
 「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
 「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
 物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
 「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
 培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
 過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
 通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
 「代理店でもコンサルでもない」I&COが企業の課題を解決する
「代理店でもコンサルでもない」I&COが企業の課題を解決する

.jpeg) 性能の割に安いUSB充電器の動作が怪しいので分解したら「謎の塊」が入っていた話
性能の割に安いUSB充電器の動作が怪しいので分解したら「謎の塊」が入っていた話  AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は  「ストリートビュー」が捉えたクレイジーすぎる光景38連発
「ストリートビュー」が捉えたクレイジーすぎる光景38連発