「技術を見せたいんです。ロボットは小型化が難しくて、大きさを2分の1にするにはコストが10倍かかると言われている。それを自分たちでやりたいと思ったんです」
そう言ってはにかんだように笑うのは、小型二足歩行ロボット「EMMA-U0A(エマ・ユーゼロエー)」を開発したROBO-Engineの二田政士氏だ。
EMMA-U0Aは全長22cm、重さはわずか850gの小型二足歩行ロボットだ。500mlのペットボトルより少し大きいくらいで、片手で簡単に持ち上げられる。「プロポ」と呼ばれるラジコンのコントローラで操作が可能。23カ所の関節のうち首を除く22カ所を自在に動かし、前後左右に歩くだけでなく、パンチを繰り出したり、倒れても1人で起き上がったりできる。
二田氏は千葉工業大学のロボットサークルで一緒にロボットの研究開発をしていた中野博文氏と、ロボット制作チームであるROBO-Engineを結成。二田氏の自宅である千葉県稲毛区の1Kマンションで、二足歩行ロボットの開発に取り組んでいる。
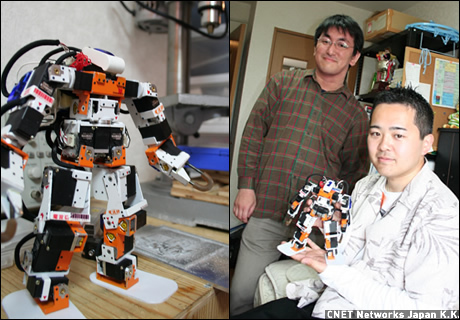 EMMA-U0A(写真左)と開発者したROBO-Engineの中野博文氏(中央)、二田政士氏(右)
EMMA-U0A(写真左)と開発者したROBO-Engineの中野博文氏(中央)、二田政士氏(右)EMMA-U0Aの最大の特徴は、小さくても安定して機敏に動く点にある。同じ大きさのロボットを作ろうとすると、重心が安定せず倒れてしまったり、動きがぷるぷると震えてしまう場合が多いという。これを避けるために、ROBO-Engineではサーボモータと呼ばれる関節を動かすための部品を独自に改造した。本体はすべてアルミ製で、モータをアルミで固定することでモータの熱を体全体で逃がすようにし、モータが発火してしまうのを防いでいる。
ロボットを動作させるプログラムはC言語で書かれることが多いが、ROBO-Engineではアセンブリ言語を使っている。C言語に比べて参考資料が少なく、汎用性が低い難点があるものの、アセンブリ言語の場合、より高い精度でロボットの動きを制御できる。また、すべての関節を異なるスピードで動かすこともでき、ダンスなどの表現力が高まるという。このほか、少ないメモリでロボットを動かせる利点もある。EMMA-U0Aに搭載されているメモリはわずか256バイトだ。
 二田氏の自宅に置かれた切削機械(上)と削りだした部品(下)。「切削機械がうるさくて眠れないので箱を作って入れました」(二田氏)
二田氏の自宅に置かれた切削機械(上)と削りだした部品(下)。「切削機械がうるさくて眠れないので箱を作って入れました」(二田氏)EMMA-U0Aの部品は、すべて汎用品もしくは手作りによるものだ。二田氏の自宅マンションに切削機械を置き、数時間かけて金属を削り出す。本体のボディだけでなく、切削機械の部品までも自分たちで作ってしまう。
「アルミを削り出しているときは、家でご飯は食べれません。作業が終わって、炊飯器でご飯を炊いて蓋を開けたら中が銀色で、何だろうと思って見たらアルミの粉末が浮いていたこともあります。布団に入って何か痛いなぁと思ってみたら、アルミの粉が中に入り込んでいたり(笑)」(二田氏)
ロボットを動かすプログラムを書くアプリケーションも自分たちで作った。表計算ソフトのEXCELをベースにしたもので、それぞれのサーボモータの動作をパラメータを入力して指定する。モーションの形を1つ1つ作って、それをつなげることで一連の動作を実現している。
部品の塗装も自宅で手がける。「塗装をした日はガソリン臭がひどくて眠れません」(二田氏)と苦労は多い。
ROBO-Engineの法人化もこれからで、現在は中野氏が代表、二田氏が技術担当という位置づけだ。現在はアルバイトをしながら生計を立てている状態。それでも二足歩行ロボットを開発するのは、一言でいえば「楽しいから」、そして「ロボットが好き」だからだ。
CNET Japanの記事を毎朝メールでまとめ読み(無料)
 心と体をたった1分で見える化
心と体をたった1分で見える化
働くあなたの心身コンディションを見守る
最新スマートウオッチが整える日常へ
 ひとごとではない生成AIの衝撃
ひとごとではない生成AIの衝撃
Copilot + PCならではのAI機能にくわえ
HP独自のAI機能がPCに変革をもたらす

 メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
 なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
 AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
 パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
 野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
 「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
 「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
 物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
 「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
 培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
 過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
 通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
 「代理店でもコンサルでもない」I&COが企業の課題を解決する
「代理店でもコンサルでもない」I&COが企業の課題を解決する

.jpeg) 性能の割に安いUSB充電器の動作が怪しいので分解したら「謎の塊」が入っていた話
性能の割に安いUSB充電器の動作が怪しいので分解したら「謎の塊」が入っていた話  絶対に迷わずにiPhoneの電源を切る(シャットダウンする)方法
絶対に迷わずにiPhoneの電源を切る(シャットダウンする)方法  なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは