KDDIとアイサンテクノロジーは9月21日、情報通信研究機構(NICT)の採択案件「ドローンと自動運転車の協調制御プラットフォーム」の実証実験の成果報告をオンラインで実施した。
当初は、実証フィールドである長野県塩尻市において、先導する自動運転車からドローンが離陸して、自動飛行している間に自動運転車が移動し、ドローンがその移動先に戻ってきて再び自動運転車の上に着陸するというデモンストレーションが行われる予定だったが、悪天候予報のため中止。事前に撮影した動画などを用いて、一連の様子が披露された。
目下の想定用途は、物流の効率化だ。労働力不足によって公共交通機関の削減、小売業者の減少、買い物弱者の増加が進む過疎地域において、自動運転車やドローンなどの多様なモビリティの活用による課題解決を図る。そのためには、モビリティ間のシステム連携、特に位置情報のシームレスな連携は必須となる。
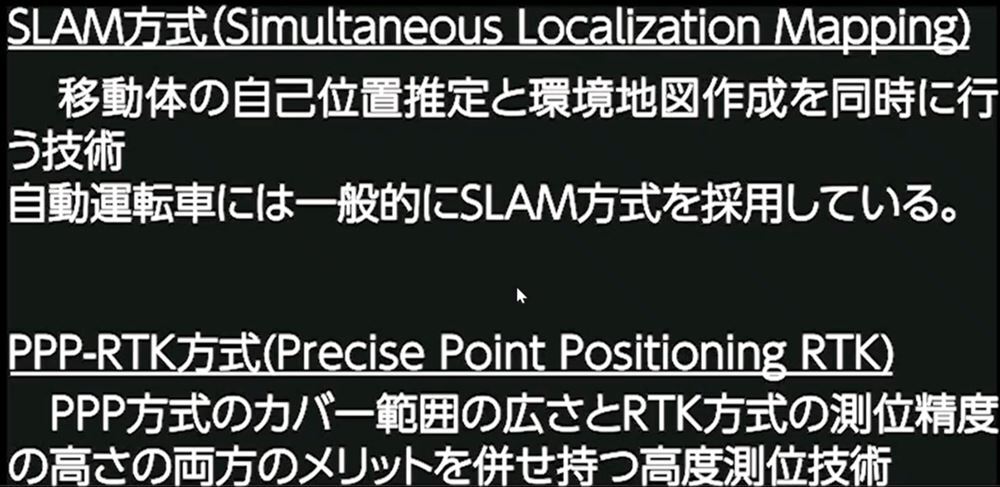
今回の実証では、自動運転車(SLAM方式)とドローン(PPP-RTK方式)という異なる測位方式で、高精度な位置情報を共有することに成功。また、中山間地域においては衛星通信に切り替えることで、ドローンの位置情報などを常時モニタリングできる環境の構築にも成功した。
両者は今後、2030年をめどに、都市部から過疎地域へは自動運転車で、陸送が非効率なエリアへはドローンでなど、全自動の荷物配送サービスの社会実装を目指す。また将来的には、自動走行ロボットや水中ドローンなど、多様なモビリティの連携を図るという。
KDDI 技術統括本部 技術戦略本部 社会実装推進部 モビリティサービスグループ グループリーダーの樫原俊太郎氏は、今回の取り組みが「KDDI Vision2030」の一環として行われていることと、実証の概要について説明した。

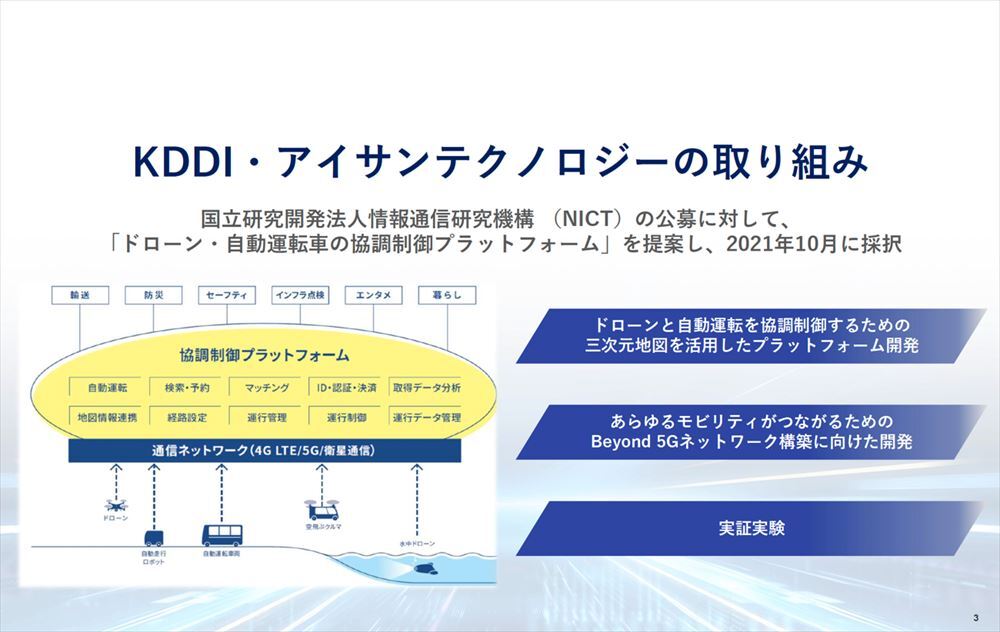
NICTの公募で、「ドローンと自動運転車の協調制御プラットフォーム」を提案し、採択されたのは2021年11月。自動運転車やドローンだけではなく、空飛ぶ車、自動走行ロボット、水中ドローンなど、さまざまなモビリティを連携させていくことを念頭に置いて取り組んできたという。
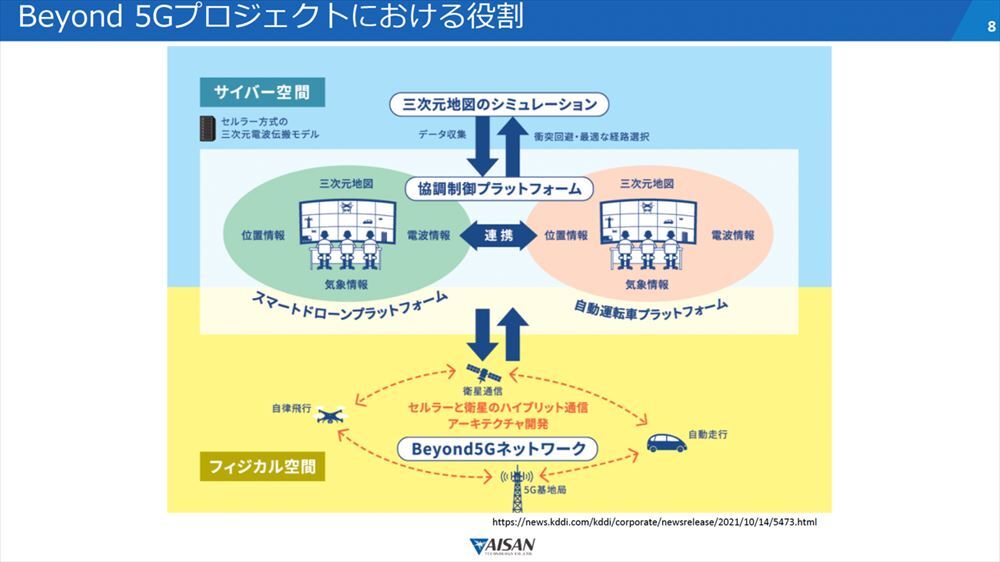
本案件における研究開発項目は、大きくは2つ。1つは、地図や各モビリティの位置情報を連携するためのプラットフォームの開発。もう1つは、4G LTE、5G、衛星通信をシームレスに接続することで“どこに行っても途切れない”通信ネットワーク、Beyond 5Gネットワークの構築に向けた開発だ。
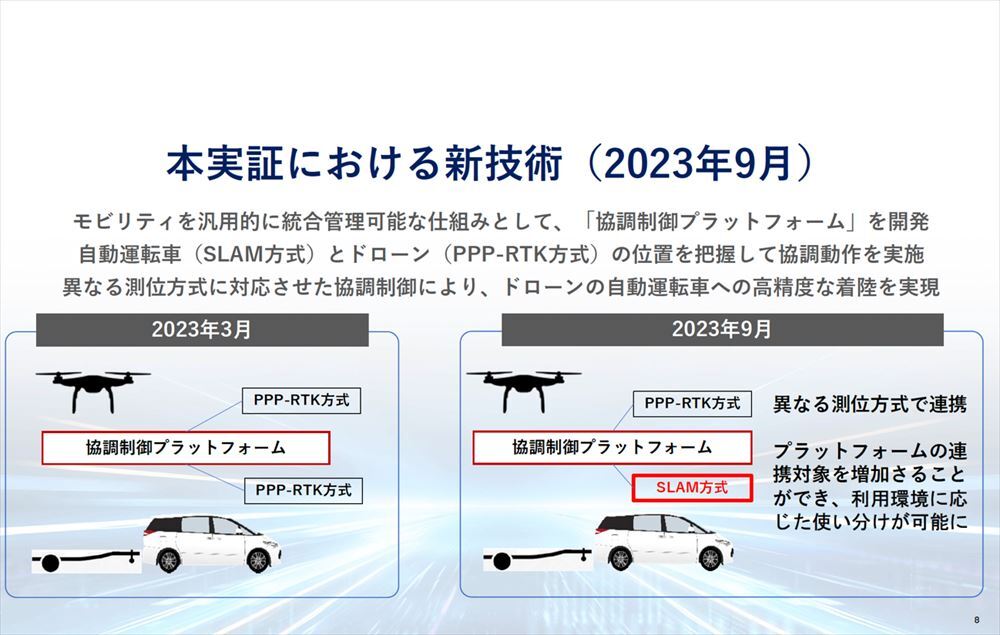
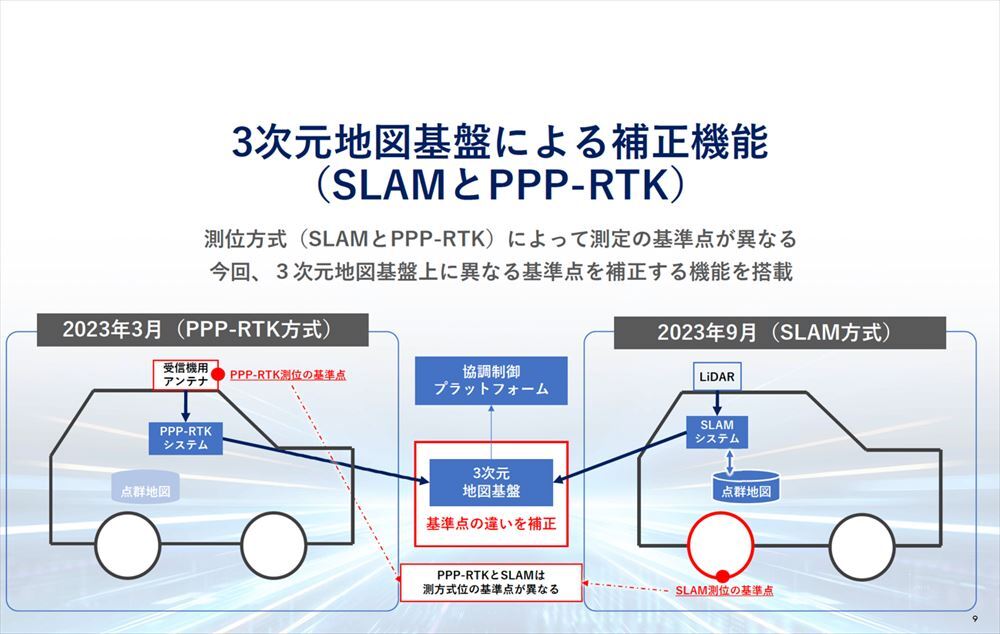
今回の実証の前段階として、2023年3月に日本初となる、移動する自動運転車の位置に合わせてドローンを離着陸させる実証を行ったという。また、ドローンの状態監視のため、衛星通信への切り替え試験も実施した。
ただし、このときは自動運転車のほうにGNSS(PPP-RTK方式)受信機を搭載して、測位方式をドローンと同じく「PPP-RTK方式」に揃えたうえで、「協調制御プラットフォーム」を通じて連携した。

第2回目となる今回の実証では、前回の成果を踏まえて、自動運転車の従来の測位方式である「SLAM方式」を使い、位置情報の連携を図ることに挑戦。
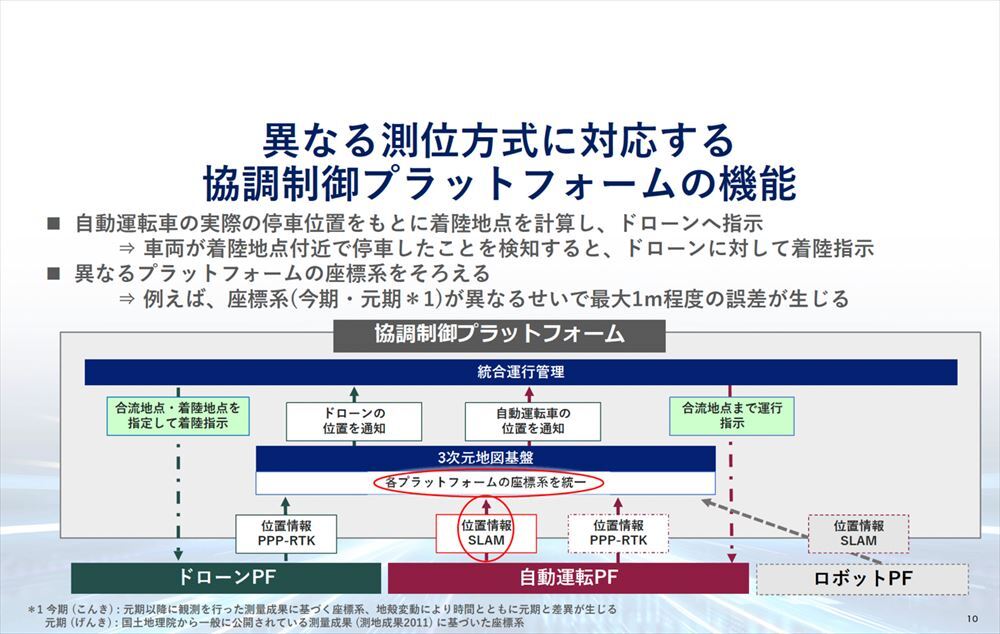
その結果、各モビリティが異なる測位方式を用いた場合でも、プラットフォームがその差異を吸収することによって、ドローンが先導する自動運転車に着陸するという高精度な位置測位を実現したという。
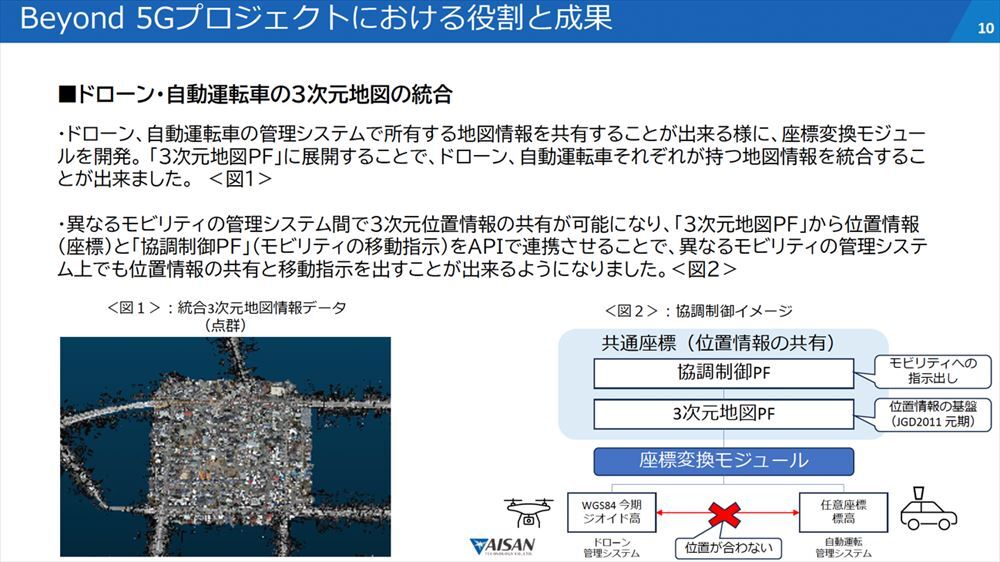
具体的には、「3次元地図基盤」で基準点の違いなどを補正することによって、最終的には同じ座標系の中でドローンと自動運転車が連携しながら稼働できるようにした。
これによって、屋内を走行するロボットなども含めて、複数のモビリティプラットフォームの座標系を統一することができ、多様な無人ロボットが“同じ空間”を認識しながら自動的あるいは自律的に動けるようになるというわけだ。
研究開発で、高精度3次元地図の製作と、ドローンと自動運転車の協調制御のための位置座標補正システムの開発を担当したアイサンテクノロジー モビリティ事業本部 部長の大石淳也氏は、Beyond 5Gプロジェクトにおける同社の役割を説明。アイサンテクノロジーが開発した「座標変換モジュール」を通じて、「三次元地図プラットフォーム」上に各モビリティの位置情報を反映し、これをベースに「協調制御プラットフォーム」からモビリティへ指示を出すという。
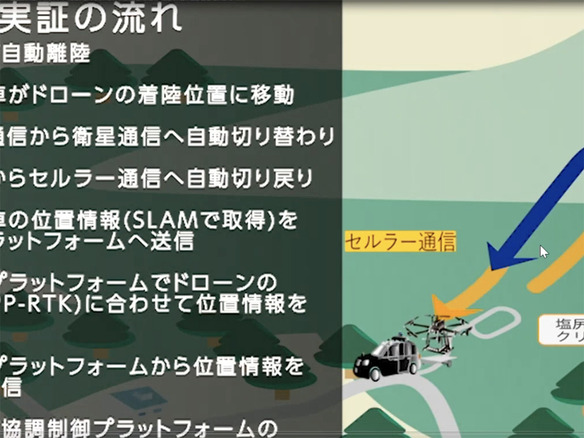
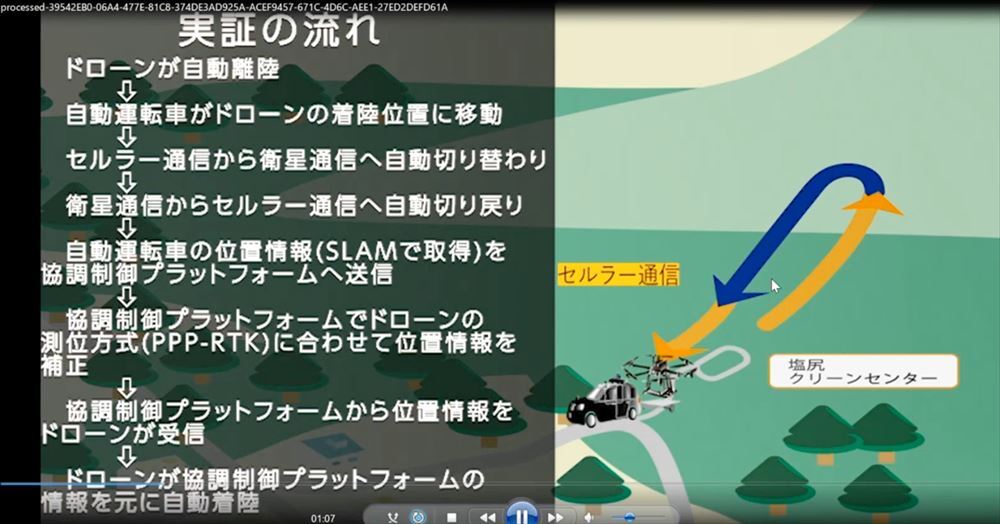
実証の流れはこうだ。まず、先導する自動運転車からドローンが離陸する。ドローンが自動飛行している間に自動運転車は、自動走行して移動する。ドローンは中山間エリアへ飛行中、衛星通信に切り替わる。荷物を配送して戻ってくる途中で、再度セルラー通信に切り替わる。ドローンは、一般的には離陸地点に自動帰還するよう設定されていることが多いが、今回は自動運転車が移動した場所を把握して、自分が離陸した自動運転車に再度着陸する。
実証の概要とデモの様子。動画では、荷物の配送は行なわれていない
樫原氏は、「ドローンは本来だと、自分がどこに帰ってくればいいのかが分からない、という状況だが、協調制御プラットフォームを使って、自動運転車が停止した位置情報を連携し、ドローンに着陸地点の位置情報や飛行経路情報を与えることによって、戻ってくることができる」と説明した。
運航中は、ドローンと自動運転車のそれぞれの状況をモニタリングしており、協調制御プラットフォーム上で両者の位置情報を常時監視することができる。ドローンが衛星通信に切り替わっている間も、「安全を確保する上で、また最低限必要と法的に問題ない精度の情報を把握しながら、ドローンを飛行することができた」(樫原氏)という。
ニュースリリースCNET Japanの記事を毎朝メールでまとめ読み(無料)
 心と体をたった1分で見える化
心と体をたった1分で見える化
働くあなたの心身コンディションを見守る
最新スマートウオッチが整える日常へ
 プライバシーを守って空間を変える
プライバシーを守って空間を変える
ドコモビジネス×海外発スタートアップ
共創で生まれた“使える”人流解析とは
 ひとごとではない生成AIの衝撃
ひとごとではない生成AIの衝撃
Copilot + PCならではのAI機能にくわえ
HP独自のAI機能がPCに変革をもたらす

 メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
 なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
 AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
 パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
 野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
 「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
 「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
 物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
 「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
 培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
 過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
 通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
 「代理店でもコンサルでもない」I&COが企業の課題を解決する
「代理店でもコンサルでもない」I&COが企業の課題を解決する

 「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた  なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは .jpeg) 性能の割に安いUSB充電器の動作が怪しいので分解したら「謎の塊」が入っていた話
性能の割に安いUSB充電器の動作が怪しいので分解したら「謎の塊」が入っていた話