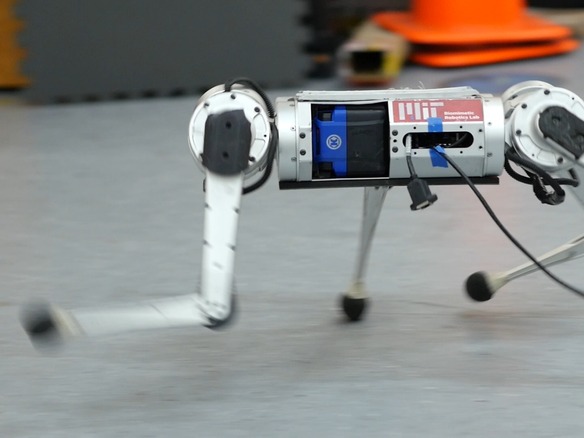
米マサチューセッツ工科大学(MIT)のコンピューター科学・人工知能研究所(CSAIL)が非常に高速で移動する四足歩行ロボットの新バージョンを公開した。4脚ロボットはここ数年、大きな注目を集めてきたが、意外なことに、ある平凡なスキルを獲得するのに苦労している。走ることだ。
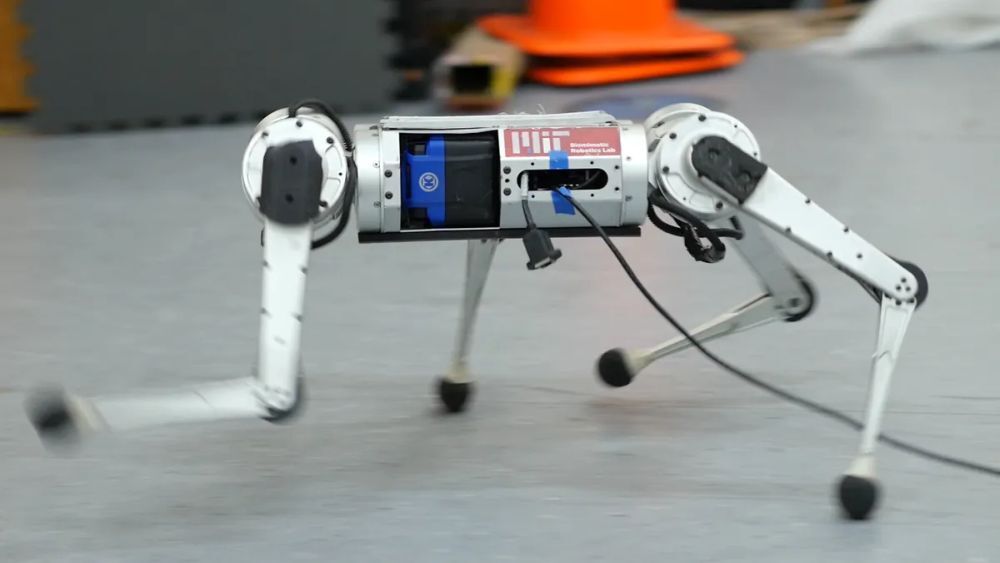
その理由は、現実世界の環境で走ることは、極めて複雑な動作であるからだ。高速で移動するため、ロボットが困難な状況(滑りやすい表面や物理的な障害物、起伏のある地形など)に直面した場合、体勢を立て直したり、適応したりする余地はほとんどない。さらに、走る動作の負荷により、ハードウェアのトルクと負荷は限界に達する。同研究所の博士課程の学生であるGabriel Margolisさんと人工知能および基本相互作用研究所(IAIFI)の博士研究員であるGe Yangさんは先頃、MIT Newsに以下のように語った。
そのような状況では、ロボットの力学を解析的にモデル化するのは困難だ。ロボットは環境の変化(例えば、芝生の上を走っているときに氷に出くわした瞬間)に迅速に対応する必要がある。ロボットが歩いている場合は、動作がゆっくりなので、雪があっても通常は問題にならない。自分がゆっくりと注意深く歩いているところを想像してみてほしい。ほぼどんな地形でも移動できるはずだ。今日のロボットも同じような問題に直面している。問題なのは、どんな地形でもまるで氷の上を歩いているかのように進んでいくのは非常に効率が悪いにもかかわらず、今日のロボットではそれが広く行われている、ということだ。人間は芝生の上では速く走り、氷の上では速度を落とす。私たちは適応する。ロボットに同様の適応能力を与えるには、地形の変化を瞬時に特定し、即座に適応してロボットの転倒を防げるようにする必要がある。要約すると、考えられるすべての地形に対して、(人間によって設計された)分析モデルを事前に構築することは非現実的であり、ロボットの力学も速度とともに複雑さが増すので、高速で走ることは、歩くことよりも困難であるということだ。
CNET Japanの記事を毎朝メールでまとめ読み(無料)
 心と体をたった1分で見える化
心と体をたった1分で見える化
働くあなたの心身コンディションを見守る
最新スマートウオッチが整える日常へ
 ひとごとではない生成AIの衝撃
ひとごとではない生成AIの衝撃
Copilot + PCならではのAI機能にくわえ
HP独自のAI機能がPCに変革をもたらす

 メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
 なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
 AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
 パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
 野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
 「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
 「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
 物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
 「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
 培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
 過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
 通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
 「代理店でもコンサルでもない」I&COが企業の課題を解決する
「代理店でもコンサルでもない」I&COが企業の課題を解決する

 AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は  「ストリートビュー」が捉えたクレイジーすぎる光景38連発
「ストリートビュー」が捉えたクレイジーすぎる光景38連発  絶対に迷わずにiPhoneの電源を切る(シャットダウンする)方法
絶対に迷わずにiPhoneの電源を切る(シャットダウンする)方法