マサチューセッツ工科大学(MIT)の研究チームは、濃霧を通して障害物の存在を認識できる技術を開発した。人間の目だと見通せないほど濃い霧のなかでも障害物の形と距離が計測可能で、自動運転車のLIDARに適用できそうだ。

自動運転車が周囲の状況を認識するシステムでは、可視光に反応するカメラがよく使われる。これは、標識や路面のサイン、車線のペイントなどを高い解像度で識別するのに適しているからだという。しかし、濃い霧を通すと光が散乱されてしまい、人間と同様に障害物の発見が難しくなる。

この問題を解決するために、研究チームはレーザー光線を発して周囲を把握するTOF(Time-Of-Flight)カメラを採用した。これは、照射したレーザー光パルスが物体に反射して戻ってくるまでの時間を計ることで物体までの距離を決定する一種のセンサだ。しかし、濃霧の場合は水滴の影響で時間がばらつき、正確な計測ができない。
霧の濃さを変えるなどして実験した研究チームは、レーザー光の戻る時間パターンが霧の濃度と関係なくガンマ分布に従うことを確認。そこで、1024ピクセルある光センサの各ピクセルでガンマ分布の性質決定に必要な2つのパラメータをリアルタイムに計算するシステムを開発し、濃霧のなかでも正確に計測できるTOFカメラを実現させた。
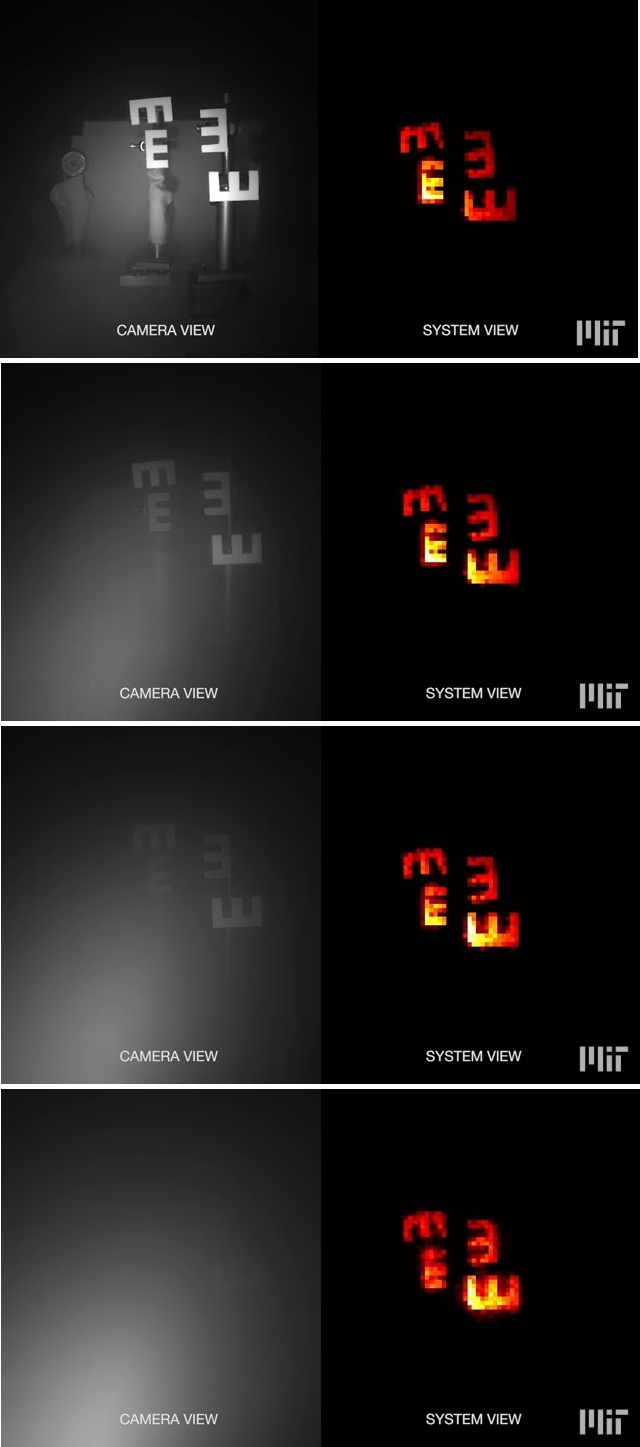
実験室で霧を再現し、人間だと36cm離れると見えなくなる状況下でも、このシステムは57cm先にある物体の形を描き出すことに成功した。これだけ見通すことが可能であれば、実際の環境で人間の能力を上回る視界の確保が可能になるという。
CNET Japanの記事を毎朝メールでまとめ読み(無料)
 ひとごとではない生成AIの衝撃
ひとごとではない生成AIの衝撃
Copilot + PCならではのAI機能にくわえ
HP独自のAI機能がPCに変革をもたらす
 心と体をたった1分で見える化
心と体をたった1分で見える化
働くあなたの心身コンディションを見守る
最新スマートウオッチが整える日常へ

 メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
 なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
 AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
 パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
 野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
 「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
 「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
 物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
 「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
 培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
 過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
 通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
 「代理店でもコンサルでもない」I&COが企業の課題を解決する
「代理店でもコンサルでもない」I&COが企業の課題を解決する

 AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は  「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた  「ストリートビュー」が捉えたクレイジーすぎる光景38連発
「ストリートビュー」が捉えたクレイジーすぎる光景38連発