ハーバード大学の研究チームは、磁界で動きを制御できるバッテリ不要の小型アクチュエータを開発した。折り紙に着想を得た構造と形状記憶合金を組み合わせることで、磁界の制御で折れ曲がって元に戻るデバイスを実際に製作できた。

折り紙は、単純なシートに折り目を付けて複雑な構造物を作ることが可能だったり、大きな構造物を小さく畳んで収納しておけたりすることから、ロボットや人工衛星などでの応用が検討されている。しかし、可動性のある構造を実現しようとすると、バッテリのような電源やモーターなどの大きな部品を組み合わせることになり、折り紙のメリットが失われてしまう。
これに対し、研究チームは受動素子だけで構成される電子回路と形状記憶合金を組み合わせ、小さなアクチュエータを作った。これは、3角形の薄いプラスチック板をベースとし、その板の3辺にそれぞれ3角形の板をヒンジで組み合わせた構造。ヒンジには、形状記憶合金で作られたコイルが取り付けられている。ベースの板には磁界の変化を電流に変換する回路があって、コイルに電流を通す際の発熱でヒンジが変形し、アクチュエータとして機能する。
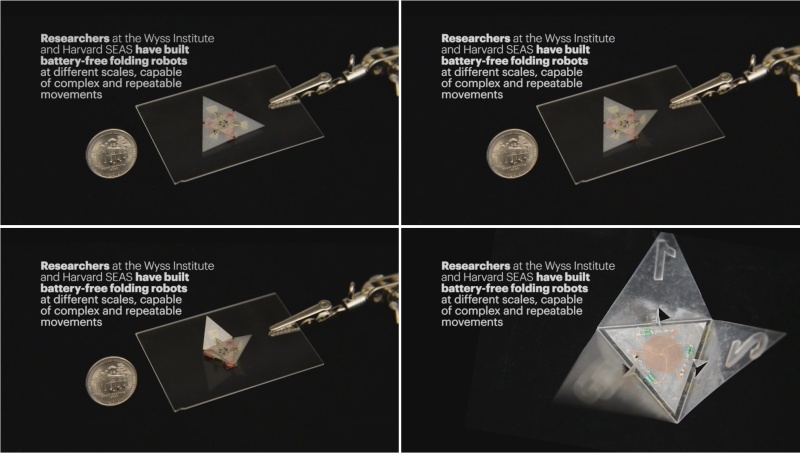
アクチュエータに給電する仕組みは、スマートフォンのワイヤレス充電などに利用されるQiと同じく電磁誘導である。ただし、受電部分の共振周波数をヒンジごとに変えることで、各ヒンジが異なる周波数の磁界に反応するようにした。この工夫により、変形させるヒンジの選択が周波数制御で可能となり、複数のアクチュエータを組み合わせれば複雑な動きも実行できる。
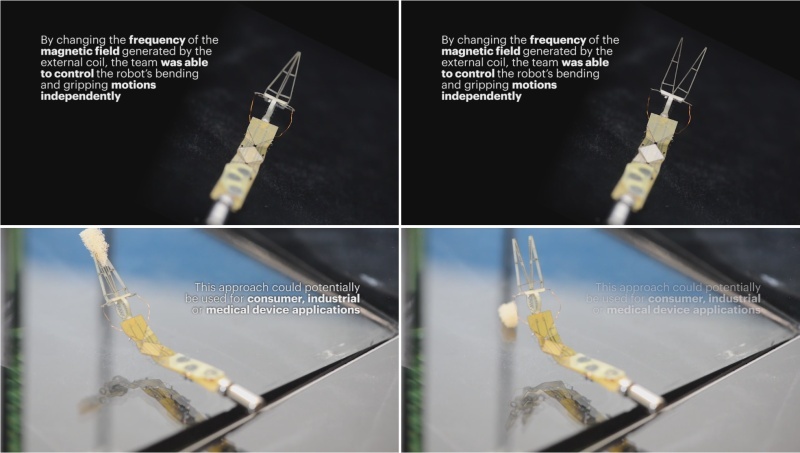
研究チームのデモンストレーション映像では、スポンジのかけらをつかむ小さなロボットアームの動きが見られる。
CNET Japanの記事を毎朝メールでまとめ読み(無料)
 ひとごとではない生成AIの衝撃
ひとごとではない生成AIの衝撃
Copilot + PCならではのAI機能にくわえ
HP独自のAI機能がPCに変革をもたらす
 心と体をたった1分で見える化
心と体をたった1分で見える化
働くあなたの心身コンディションを見守る
最新スマートウオッチが整える日常へ
 プライバシーを守って空間を変える
プライバシーを守って空間を変える
ドコモビジネス×海外発スタートアップ
共創で生まれた“使える”人流解析とは

 メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
 なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
 AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
 パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
 野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
 「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
 「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
 物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
 「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
 培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
 過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
 通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
 「代理店でもコンサルでもない」I&COが企業の課題を解決する
「代理店でもコンサルでもない」I&COが企業の課題を解決する

 絶対に迷わずにiPhoneの電源を切る(シャットダウンする)方法
絶対に迷わずにiPhoneの電源を切る(シャットダウンする)方法  「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた  なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは