
Googleの自動運転車プロジェクト担当ディレクターのChris Urmson氏は、先頃起きた自動運転車とバスの衝突事故について、テキサス州オースティンで開催の「South by Southwest」(SXSW)で壇上に立って明確に説明した。Urmson氏は、自動運転車テクノロジの進歩についても語り、先頃の事故さえも同テクノロジにとって貴重な学習体験だと述べた。
米国時間2月14日に発生したこの事故では、Googleが改造を施して自動運転用のセンサやコントロールを追加した「Lexus RX 450h」と、カリフォルニア州マウンテンビューの市営バスが衝突した。この低速衝突事故で、バスと自動運転車の両方が少し破損したが、けが人はなかった。これは、現実世界で140万マイル(約225万3000km)の走行テストを実施してきたGoogleの自動運転車が起こした初めての衝突事故だった。
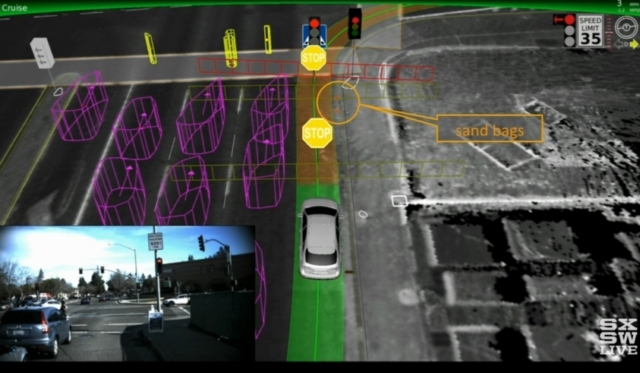
Urmson氏がSXSWでした説明によると、Googleの自動運転車は右折の際、人間のドライバーと同じように、道路の縁に車を寄せて、信号で停止した車の横を進むようにプログラムされているという。自動運転車は道路の縁を前進していたとき、前方の道路に砂袋がいくつかあることを検知したので、車を停止させて隣の車道が空くのを待つことにした。
信号が青になり、車の流れが動き始めた。自動運転車は隣の車線のバスが近づいてきていることを検知したが、バスの運転手が減速すると判断した。Urmson氏の説明によると、バスの運転手は自動運転車が発車しないと判断して、そのまま走り続けたという。自動運転車は隣の車線に移動し、時速約2マイル(約3.2km)でバスの側面に衝突した。
Urmson氏によると、この衝突事故を受けて、同氏のチームは「再発防止のために3500の新しいテストを実施」したという。
Googleの自動運転車プロジェクトでは、ディープラーニングテクノロジが重要な役割を果たしている。そして、今回の衝突事故を起こした自動車の体験は新しい運転パラメータセットとして、Googleの自動運転車部隊の全車に送信される。現在、公道を自動運転しているGoogleの全車両は現実世界の状況から経験を収集しており、ディープラーニングテクノロジを通してそれらの経験を共有している、とUrmson氏は述べた。
この記事は海外CBS Interactive発の記事を朝日インタラクティブが日本向けに編集したものです。
CNET Japanの記事を毎朝メールでまとめ読み(無料)
 プライバシーを守って空間を変える
プライバシーを守って空間を変える
ドコモビジネス×海外発スタートアップ
共創で生まれた“使える”人流解析とは
 心と体をたった1分で見える化
心と体をたった1分で見える化
働くあなたの心身コンディションを見守る
最新スマートウオッチが整える日常へ
 ひとごとではない生成AIの衝撃
ひとごとではない生成AIの衝撃
Copilot + PCならではのAI機能にくわえ
HP独自のAI機能がPCに変革をもたらす

 メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
 なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
 AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
 パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
 野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
 「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
 「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
 物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
 「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
 培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
 過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
 通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
 「代理店でもコンサルでもない」I&COが企業の課題を解決する
「代理店でもコンサルでもない」I&COが企業の課題を解決する



 「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた  「ストリートビュー」が捉えたクレイジーすぎる光景38連発
「ストリートビュー」が捉えたクレイジーすぎる光景38連発  なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは