
ソフトバンクと国立研究開発法人 森林研究・整備機構の森林総合研究所は2022年6月28日、スマート林業とゼロエミッションの実現に向け四足電動ロボットを荷物の運搬に活用するための実証実験を開始したことを発表。茨城県つくば市にある森林総合研究所で、その実証実験の様子を披露した。
この実験は、国立研究開発法人 新エネルギー・産業技術総合開発機構(NEDO)が推進する「NEDO先導研究プログラム/新技術先導研究プログラム」の「エネルギー・環境技術先導研究プログラム」の追加募集に、ソフトバンクと森林総合研究所が共同で提案し実施した。
森林総合研究所の研究ディレクターである宇都木玄氏によると、提案の背景には林業が抱える課題を解決する狙いがあるという。現在国内の人工林の50%は伐採適齢期を迎えており、森林資源自体は充実しているというが、その一方で木材の自給率は40%にとどまっており、国産材の供給力強化が求められている。

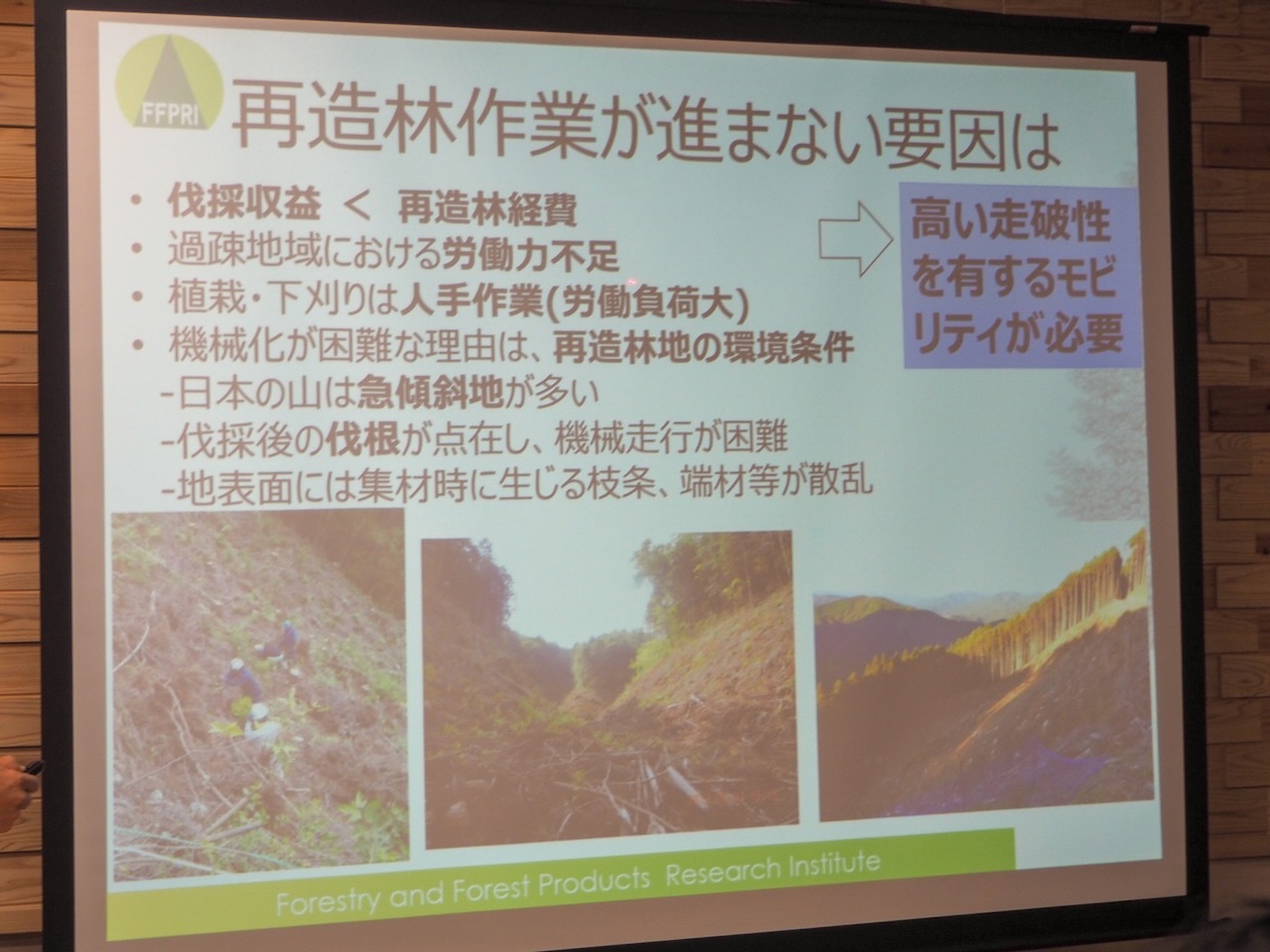
だが、そこには大きな課題があるといい、この10年間で森林の伐採面積は増えているものの、そのうち木を切った後に苗を植える「再造林」がなされる割合は30〜40%にとどまっているという。その理由について宇都木氏は、伐採で得られる収益よりも再造林にかかる経費の方が大きく、収益化が困難なことに加え、植栽や手入れが手作業で非常に手間がかかること、そして少子高齢化で過疎地での労働力不足が深刻化していることなどを挙げている。
それに加えて、近年では猟師が激減してしまったことで、シカなどが再造林の苗木を食べてしまう問題もあるという。その被害は年間50億円にのぼるとの報告もあり、深刻な状況となっているようだ。
さらに、日本の山は急傾斜地が多く、伐根(伐採後の木の根)が点在、さらには地表面には集材時の端材などが散乱し、既存の機械が入り込むのが困難であることから、再造林の機械化も難しかったとのこと。それら一連の課題を解決するには、高い走破力を備えマルチに使える機能を持ち、なおかつ小型で脱炭素につながる電動の新しいモビリティが必要と考えていたと宇都木氏は話す。
そこで注目したのが四足歩行ロボットであり、今回の実証実験では米ボストンダイナミクスの「SPOT」という四足歩行ロボットが用いた。採用の理由に理由について宇都木氏は、30度までの傾斜を登ることができ、30cmの障害物を乗り越えられ、なおかつ自動で歩行できるなど、林業に適した高い性能を備えていることを挙げている。

今回はあくまで実証実験ということもあり、現時点での性能を重視しボストンダイナミクス製のロボットを用いたというが、将来的には「国産で作ることを目指さないと、職場に合った適切な機能を組み込むのは難しい」と宇都木氏は話した。なお、森林総合研究所のスマート林業ロードマップでは、2050年までに伐倒も含めた完全自動化とAIによる生産管理を実現するとしており、その実現のためにも2030年には、急斜面を含めた不整地でのムービングとハンドリングができるデバイスの開発が必要としている。
続いて、ソフトバンクのCSR本部 地域CSR企画室 室長の安東幸治氏が実証実験の詳細について説明した。

この研究自体は2021年4月より実施されており、2021年度は山の斜面で四足歩行ロボットがどの程度歩くことができるのかという基本的な性能を検証するとともに、どのような機能を活用できるのかを確認してきたという。検証は森林総合研究所内にある造林地と、北海道下川町の町有林で進めてきたというが、その結果「30度くらいまではいける(昇り降りができる)」と安東氏は説明、期待通りの成果が得られたとしている。
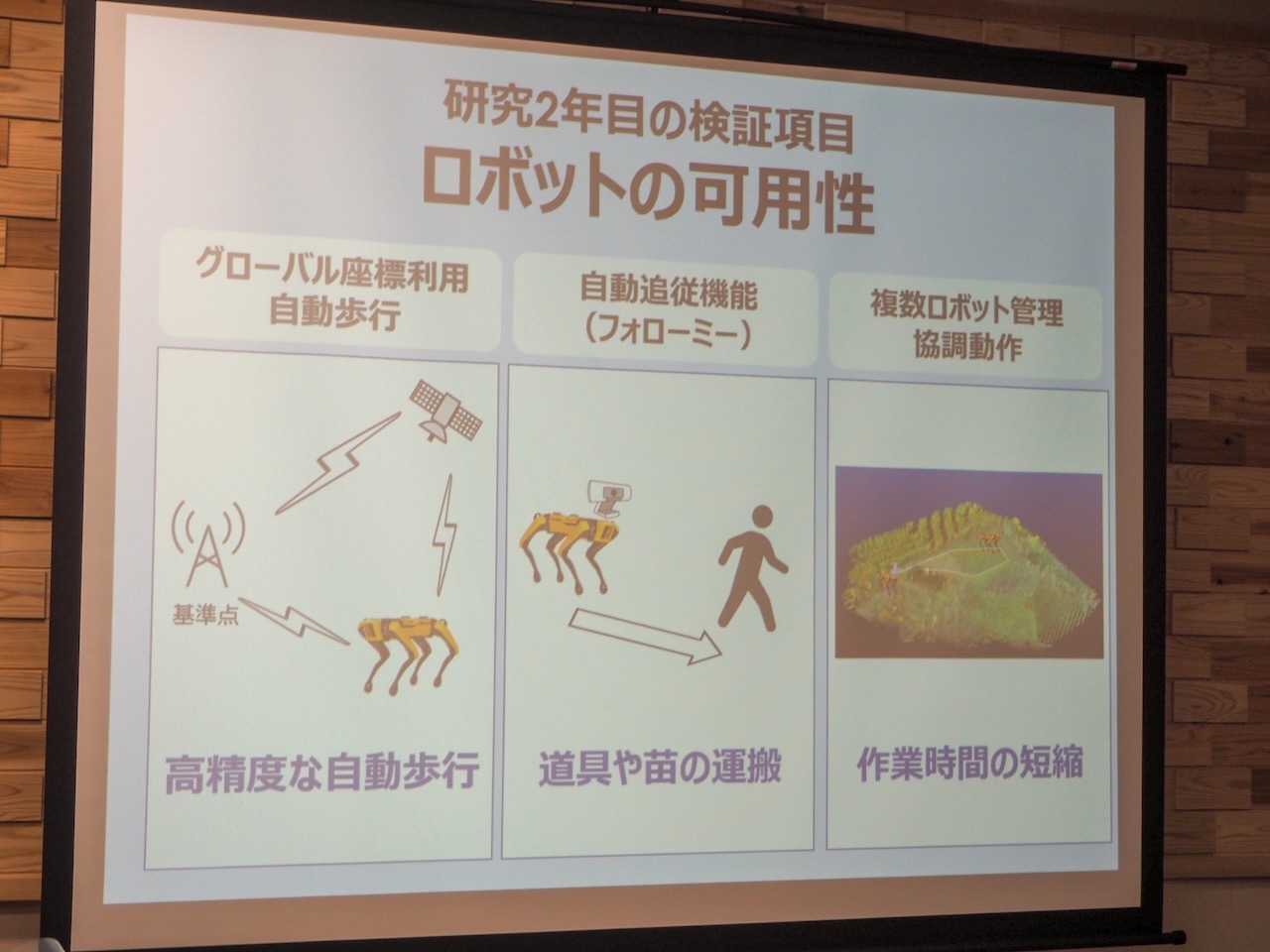
一連の実証により期待できる作業として、1つに自動走行機能を用いてのシカ被害防止用柵の点検、そしてもう1つに、スキャナーを搭載して地表を調査計測し、作業工程を組み立てるのに必要な情報を得ることが挙げられており、2022年度はその実現に向けた機能検証をするとしている。具体的には準天頂衛星によるグローバル座標を用いた自動歩行制御や、人の動きを自動的に追従する「フォローミー」機能による道具や苗の運搬、そして複数台のロボットによる協調動作などの検証に取り組むとのことだ。
そしてもう1つ、安東氏が今年度検証したい項目として挙げているのが、森林内の通信環境整備である。通信はロボットの制御だけでなく、そこで働く人がスマートフォンでコミュニケーションなどをする上でも重要な存在だが、森林の中は電波環境が非常に厳しいことから環境改善が大きな課題となっており、とりわけスマートフォンの利用に慣れた人が若い人が林業に就く上で、通信環境をいかに確保するかは重要な要素になってくるという。
そこでソフトバンクでは低軌道衛星を経由して森林内での無線通信を実現する検証を実施するとのことで、端末との通信にはロボットには長距離Wi-Fi、スマートフォンにはsXGP、つまりプライベートLTEを用いて接続することを検証、森林内での電波伝搬特性などを確認するとしているとしている。ただ安東氏によると、世界情勢の影響から現在は低軌道衛星を使うことができず、代替の手段を用いているとのことだ。
ちなみに2021年時点ではロボットにもsXGPで実証を進めていたそうだが、上りの帯域が足りないことからWi-Fiを活用するに至ったとのこと。またスマートフォンに関しては、sXGP対応端末がデュアルSIMに対応していることから、端末に2枚のSIMを挿入しておき、森林内ではsXGP用のSIMに、通常の環境では通常のSIMに切り替えて通信することを想定しているという。

また今回の実証実験では、一次産業のデジタル化などで注目されている5Gが用いられていない。その理由についてソフトバンク関係者は、低遅延や多数同時接続など、5Gが得意とする機能が今回の実証で必要としていないことから、5Gにこだわらずに通信方式を選んだと説明している。
なお会場となった森林総合研究所では、SPOTを用いて敷地内の造林地で自動走行試験をする様子も披露された。今回披露されたのは、17.5度、25度といった傾斜を、ペットボトルなど12.5kgの荷物を載せたSPOTが自動で登ったり、降りたりするというものになる。
当日は30度を超える熱さであったことから、SPOTの通信や手動操作に必要なコントローラーが熱暴走してしまい、その影響で動作が止まってしまうなどのトラブルも発生していた。だがそれでもSPOT自体の動作に問題はなく、荷物を載せながらも傾斜を安定して走行する姿を確認することができた。


CNET Japanの記事を毎朝メールでまとめ読み(無料)
 心と体をたった1分で見える化
心と体をたった1分で見える化
働くあなたの心身コンディションを見守る
最新スマートウオッチが整える日常へ
 ひとごとではない生成AIの衝撃
ひとごとではない生成AIの衝撃
Copilot + PCならではのAI機能にくわえ
HP独自のAI機能がPCに変革をもたらす
 プライバシーを守って空間を変える
プライバシーを守って空間を変える
ドコモビジネス×海外発スタートアップ
共創で生まれた“使える”人流解析とは

 メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
 なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
 AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
 パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
 野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
 「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
 「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
 物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
 「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
 培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
 過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
 通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
 「代理店でもコンサルでもない」I&COが企業の課題を解決する
「代理店でもコンサルでもない」I&COが企業の課題を解決する

 AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は  なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは .jpeg) 性能の割に安いUSB充電器の動作が怪しいので分解したら「謎の塊」が入っていた話
性能の割に安いUSB充電器の動作が怪しいので分解したら「謎の塊」が入っていた話