ロボット手術と聞いてたいていの人が思い浮かべるのは、患者の体の上で腕を旋回させる遠隔操作されたロボットアームや、外科医が精密な手術器具を治療すべき患部へと導くのを手助けする小型内視鏡カメラかもしれない。
磁気で制御されたスライム状のロボットが、SFに出てくるヘドロ状の怪物のように、消化管の中を滑るように進んで物体を呑み込むところを思い浮かべる人は、恐らくいないだろう。
だが、「Reconfigurable Magnetic Slime Robot」を生んだのは、まさにそうしたアイデアだ。これは伸縮自在でナメクジのようなロボットで、狭い空間を押し分けて進んだり、物体をすっぽりと包んだりでき、2つに切られても「自己修復」が可能だ。
香港中文大学の研究チームが開発したこのスライムロボットは、非ニュートン流体なので、固体のようにも液体のようにも振る舞える。これはポリビニルアルコール(PVA)とホウ砂の混合物で出来ているが、非ニュートン流体は家庭でもコーンスターチと水を使って作れる。
プロジェクトの指導者の1人である香港中文大学機械・自動化工学部のLi Zhang教授によると、非ニュートン流体は、高速で触れると固体の物体のように振る舞うが、優しくゆっくりと触れると液体のように振る舞うという。そうした働きにより、このロボットは、動き回るのに十分な伸縮性を備えながら、ワイヤやボールベアリングのような物体を包み込むのに十分な硬さにもなれる。
ロボットの制御には、この液体に混ぜ込まれた非常に小さな磁性粒子が用いられる。この磁性粒子のおかげで、磁場を利用してスライムを操作できる。たとえば、1つの磁石を使って狭い空間や経路を誘導したり、2つの磁石を使って固定したり引き伸ばしたりできる。また、制御用の磁石を回転させることで、物体を包んだり掴んだりするなど、Zhang氏が「タコの足」と表現した動作が「簡単に」できるという。
さらに、このスライム混合物は電気を通すため、電線に巻きつけたり手の届きにくい場所にある回路を修理したりするのに利用できる可能性があると、Zhang氏は説明する。
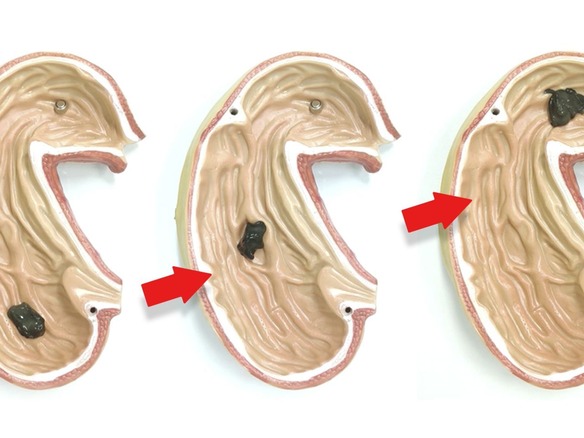
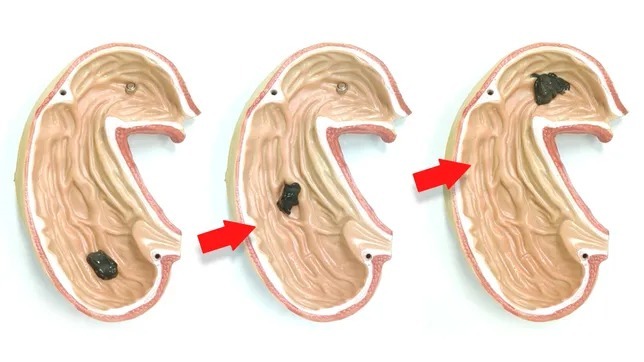
だが、このスライムロボットの真の狙いは、内科的な処置に利用できるかテストすることだ。そうした利用法では、消化管を傷つけずにロボットを通過させることが可能になる。
Zhang氏らは現在、電池などの有害な物体を誤って飲み込んだ場合に、このロボットで包み込むことが可能かを検討中だという。
この記事は海外Red Ventures発の記事を朝日インタラクティブが日本向けに編集したものです。
CNET Japanの記事を毎朝メールでまとめ読み(無料)
 プライバシーを守って空間を変える
プライバシーを守って空間を変える
ドコモビジネス×海外発スタートアップ
共創で生まれた“使える”人流解析とは
 ひとごとではない生成AIの衝撃
ひとごとではない生成AIの衝撃
Copilot + PCならではのAI機能にくわえ
HP独自のAI機能がPCに変革をもたらす
 心と体をたった1分で見える化
心と体をたった1分で見える化
働くあなたの心身コンディションを見守る
最新スマートウオッチが整える日常へ

 メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
 なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
 AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
 パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
 野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
 「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
 「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
 物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
 「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
 培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
 過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
 通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
 「代理店でもコンサルでもない」I&COが企業の課題を解決する
「代理店でもコンサルでもない」I&COが企業の課題を解決する

 AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は .jpeg) 性能の割に安いUSB充電器の動作が怪しいので分解したら「謎の塊」が入っていた話
性能の割に安いUSB充電器の動作が怪しいので分解したら「謎の塊」が入っていた話  絶対に迷わずにiPhoneの電源を切る(シャットダウンする)方法
絶対に迷わずにiPhoneの電源を切る(シャットダウンする)方法