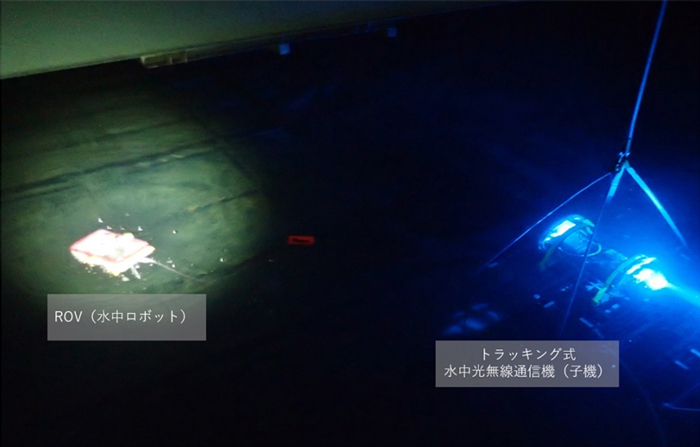
ソフトバンクと東京海洋大学の後藤慎平助教らの研究チームは10月22日、陸上から水中の遠隔操作ロボット(ROV:Remotely Operated Vehicle)に光無線通信経由で指示を与え、リアルタイムに制御する実証実験に成功したと発表した。
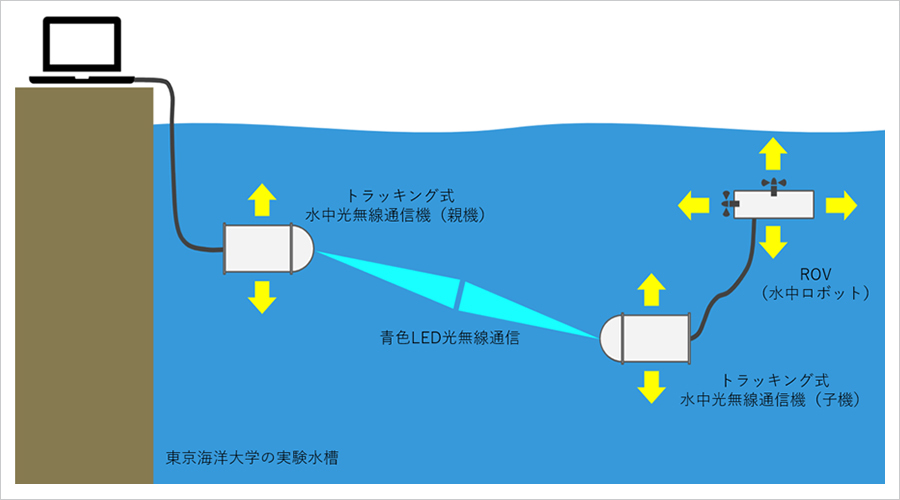
同実験は、Beyond 5Gによる海の産業革命を目指して行われたもので、画像処理技術や精密制御技術を駆使して、水平方向と垂直方向にそれぞれ約60度の自動追尾性能を持ち、ROV本体から有線接続で独立して動作するトラッキング式水中光無線通信機を開発。
照射角7度の可視光無線通信機を使って、東京海洋大学の全長50mの船舶運航性能実験水槽の水深約1mで、2台の通信機(親機と子機)が互いを捕捉して自動で光軸を合わせ、子機に接続されたROVを陸上のPCから操作するものとなる。
両者によると、船舶やROVなどの水中航走体の本体に有線接続され(本体に随伴して自律動作するトラッキング式の水中光無線通信機同士が自動で捕捉・追尾し合って通信を確立・維持している状態)で、水中航走体を遠隔操作する実証実験の成功は世界初になるという。
近年、海洋国家である日本の沿岸・離島地域における水産業や海上輸送の高度化、洋上風力発電などの新産業や海洋観光などといった海域利活用の発展に向けて、海中で働く遠隔操作ロボットや自律航行ロボット向けの水中無線通信ネットワークへの期待が高まっている。
しかし、海水・淡水を問わず水中では電波がほとんど透過しないため、既存の無線通信技術は利用できない。
そのため、水中での通信には音波が使用されてきたが、遅延やノイズなどの外乱の影響が大きく、伝送速度も数百キロビット毎秒程度と限られており、大容量の映像伝送や観測機器のリアルタイム制御には課題があった。
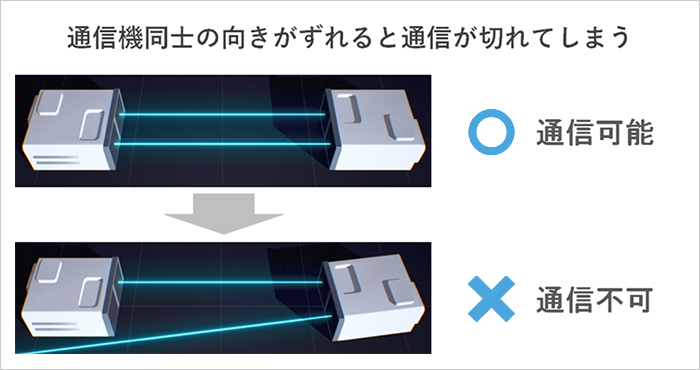
大容量・低遅延の可視光を使用した無線通信技術を水中の通信に適応する研究が各国で進められているが、高出力を維持したまま遠方まで光を照射するには、ビーム幅の狭いレーザー光(概ね±10〜15度程度)に頼らざるを得ないというのが現状。
通信の質を維持するためには、送信機と受信機の光軸を正確に一致させる必要があることから、水流などの影響により姿勢の保持が難しい水中航走体などに対し、大容量・低遅延の無線通信を可能とする光無線通信の安定的な通信を実現する技術として、画像認識によるトラッキング技術に着目。両者で共同研究を進めてきた。
今回の実験結果から、自律動作型のトラッキング式水中光無線通信機を使用することで、水中航走体を安定的に制御することが可能となった。これにより、海底ステーションと水中航走体のドッキングやデータ通信、有人潜水船から小型の航走体を発進させて狭小部を調査する技術、海底地盤の高精度な変化計測など、さまざまな分野での活用が見込めるという。
また、自律制御ロボットの群制御による効率的な海洋資源管理や水中設備点検、海底灯台による海中航路や新航法の開拓による海の次世代モビリティの利活用といった新たな市場の創出も期待できるとしている。
通信距離がさらに長くなれば、実用的な水中(海中)無線通信ネットワーク網の構築によって、海洋産業の効率化や新産業の創出などで大きな経済効果が期待できる。
両者は、Beyond 5Gによる海の産業革命の実現に向けて、より高度なトラッキング技術の研究開発を進め、通信距離1kmを超える長距離水中光無線通信の実現による全球的な海中通信網の確立を目指す。
CNET Japanの記事を毎朝メールでまとめ読み(無料)
 プライバシーを守って空間を変える
プライバシーを守って空間を変える
ドコモビジネス×海外発スタートアップ
共創で生まれた“使える”人流解析とは
 心と体をたった1分で見える化
心と体をたった1分で見える化
働くあなたの心身コンディションを見守る
最新スマートウオッチが整える日常へ
 ひとごとではない生成AIの衝撃
ひとごとではない生成AIの衝撃
Copilot + PCならではのAI機能にくわえ
HP独自のAI機能がPCに変革をもたらす

 メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
 なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
 AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
 パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
 野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
 「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
 「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
 物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
 「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
 培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
 過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
 通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
 「代理店でもコンサルでもない」I&COが企業の課題を解決する
「代理店でもコンサルでもない」I&COが企業の課題を解決する

 「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた .jpeg) 性能の割に安いUSB充電器の動作が怪しいので分解したら「謎の塊」が入っていた話
性能の割に安いUSB充電器の動作が怪しいので分解したら「謎の塊」が入っていた話  なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは