
農研機構、立命館大学、デンソーは12月23日、人とほぼ同じ速度でのリンゴやナシなどの果実収穫を実現できる果実収穫ロボットのプロトタイプを開発したと発表した。
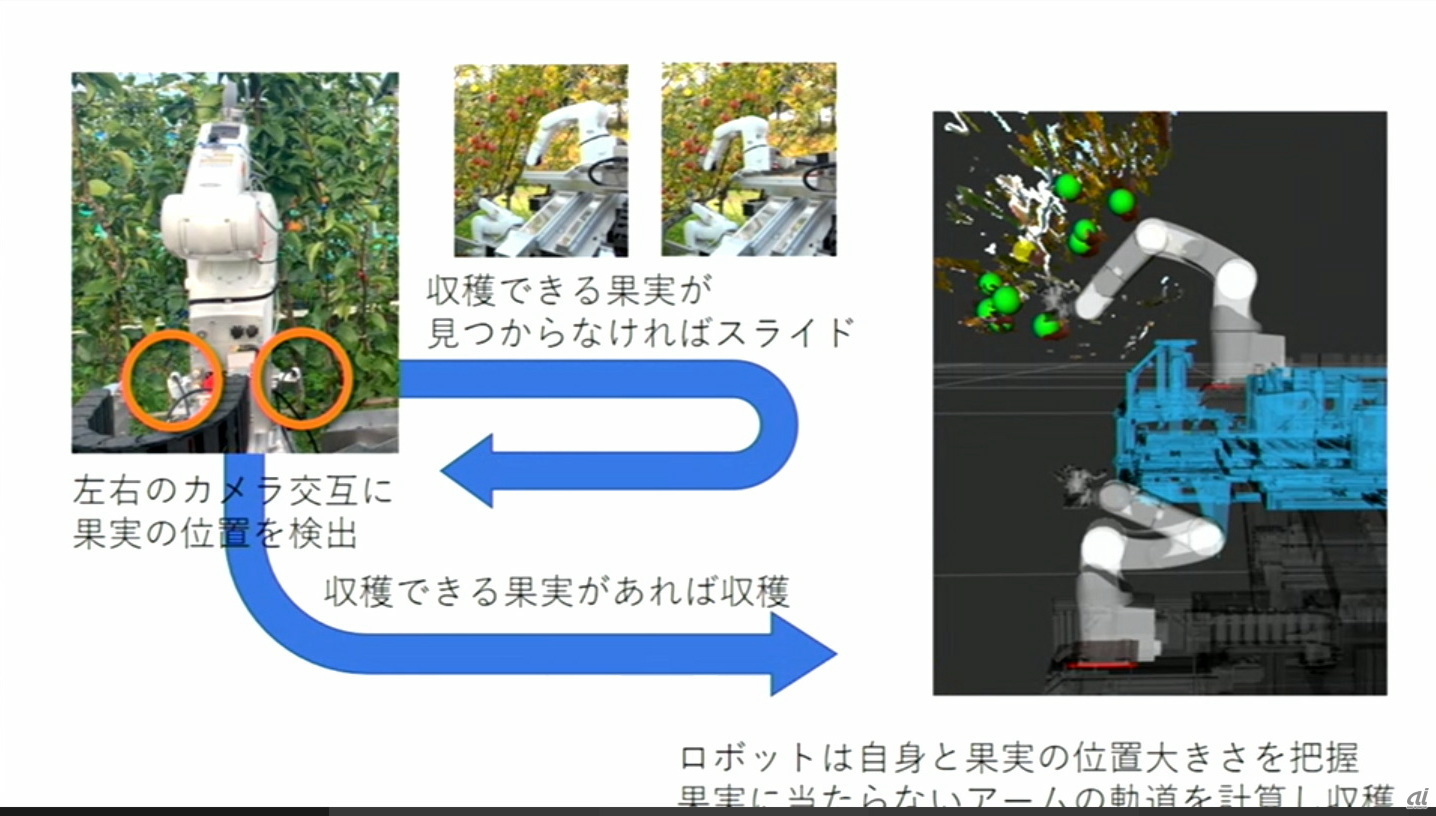
人による収穫(11秒/個)とほぼ同じ速度で収穫でき、西洋なしは袋に入ったまま収穫できる。およそ1時間に約300個の収穫が可能という。収穫ロボットは、立命館大学が果実認識、収穫時期判定などのソフト開発、デンソーが収穫ロボットのハード開発を担当した。
果樹生産の担い手の減少と高齢化に対応するため、作業の大幅な省力化に向けた作業用機械の自動化・ロボット化と機械化に適した樹形の開発を推進する試みだ。
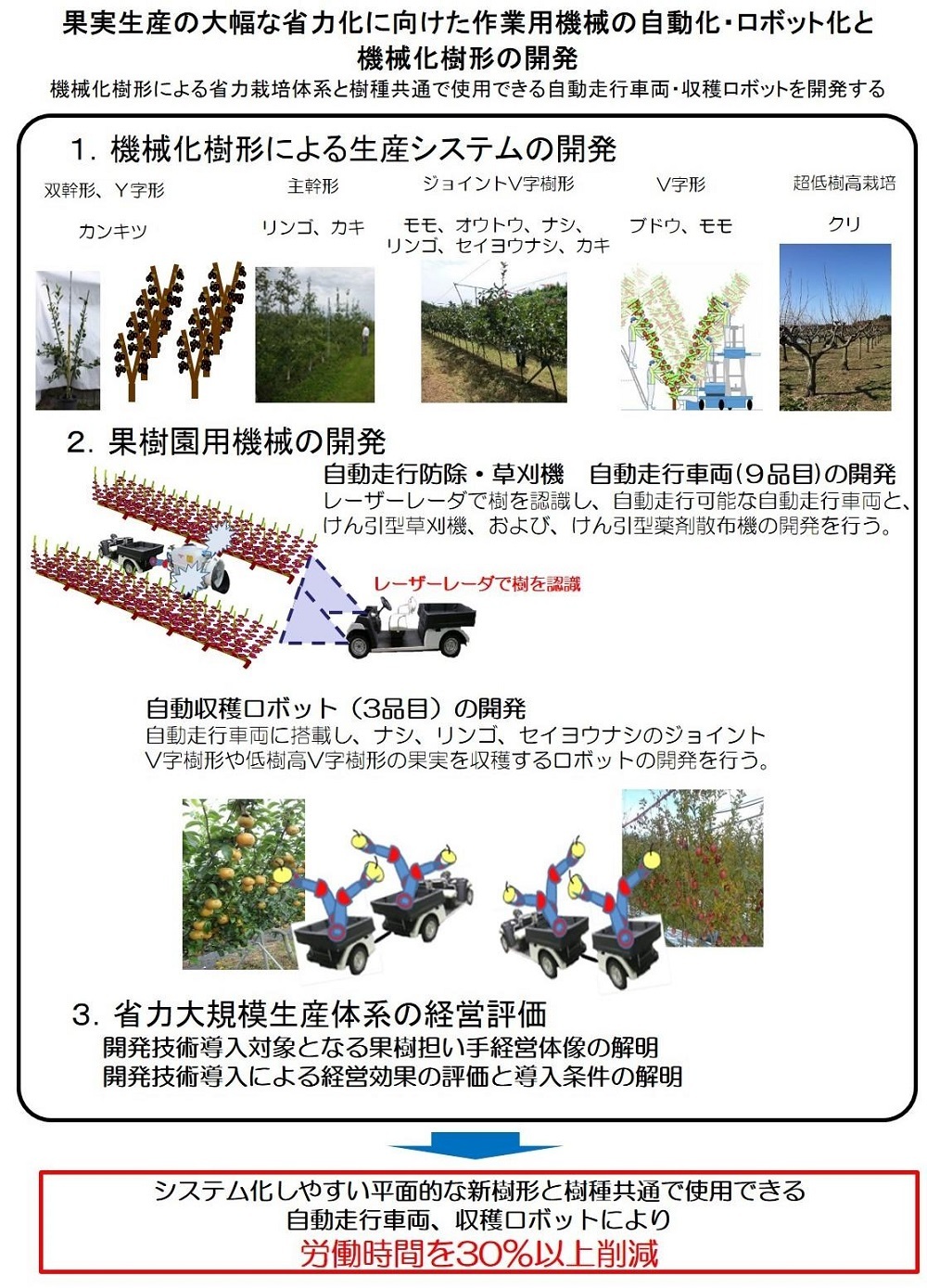
具体的には、カンキツ、リンゴなど果樹9品目において、作業の自動化・機械化が容易なV字樹形などの列状密植樹形を開発。さらに、作業用機械の自動化・ロボット化については、V字樹形のリンゴ、ニホンナシ、セイヨウナシを対象とした果実収穫ロボットのプロトタイプを開発した。
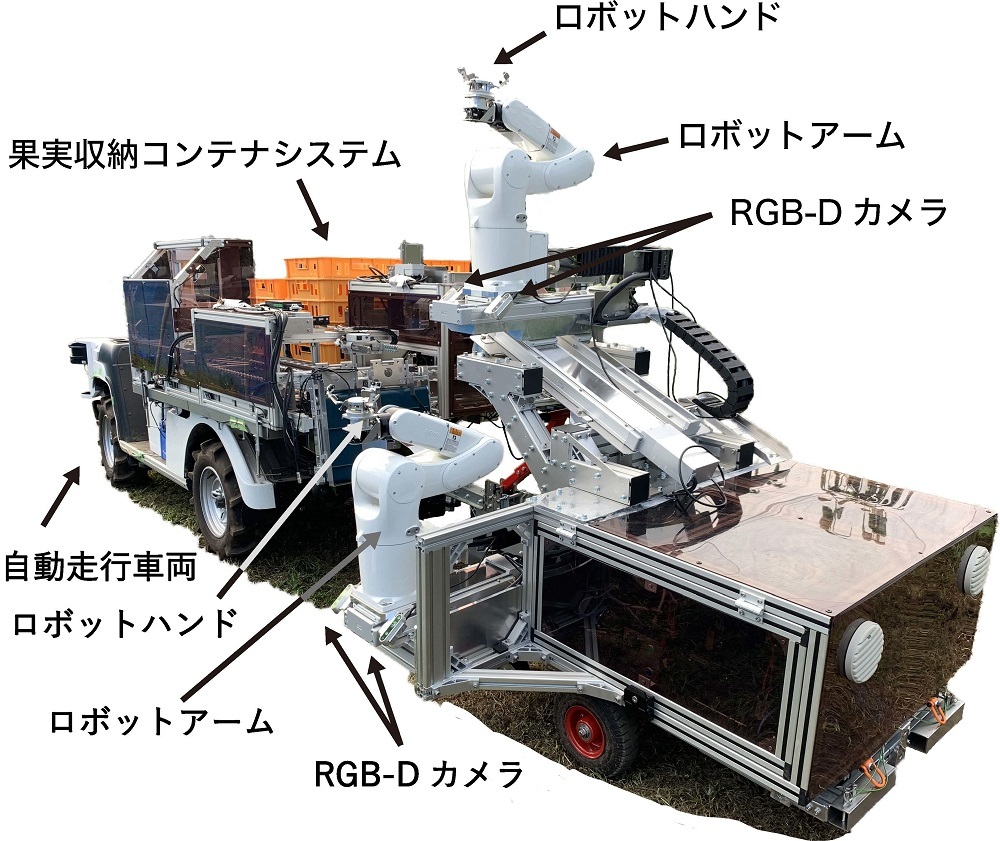
同プロトタイプは、自動走行車両にけん引されながら、2本のアームにより果実の収穫を実行する。なお、果実を把持するためのハンドは3つの爪で構成され、果実を傷つけない程度の把持力で果実を掴みながら、ハンドの回転により収穫するという。
収穫した果実は、自動走行車両の荷台に設置した果実収納コンテナシステムに送られる仕組みで、コンテナが果実で一杯になると、空のコンテナと自動で交換しながら自動収穫を継続する。
 ゴルフカートをベースにした収穫ロボット
ゴルフカートをベースにした収穫ロボット現在、日本の果樹生産者の年齢構成は60歳代が最多となっており、今後さらなる高齢化が危惧されている。このような状況を打破するため、少ない人手で産地を維持できる画期的な省力生産技術、若い生産者の関心を引く魅力ある果樹生産技術の開発が強く求められているという。
そのためには、作業の機械化が必須となるが、果樹は樹形が立体的(3次元)で複雑なため、受粉、摘果、収穫、整枝・せん定など多くの作業が手作業に頼らざるを得ず、機械化が遅れている。

しかし、近年は自動車の自動走行や各種ロボット、AI技術の開発と低価格化など関連技術の進歩が著しく、果実収穫といった複雑な作業においても、これらの革新的技術を取り込んだ機械開発の可能性が見えてきたという。
そこで、農研機構が代表を務める「革新的技術開発・緊急展開事業(人工知能未来農業創造プロジェクト:AIプロ)」では、機械化を推進するために、樹種共通で樹形を可能な限り平面(2次元)に近づけるV字樹形などの列状密植樹形の開発(果樹側からの機械化への歩み寄り)を行ってきた。

さらには、同樹形を前提にさまざまな作業に利用できる自動走行車両、自動薬剤散布システム、自動草刈りシステム、さらにリンゴ、ニホンナシ、セイヨウナシの収穫ロボットの開発・研究を進めている。
自動走行車両、自動薬剤散布システム、自動草刈りシステムについては開発済み。今回、V字樹形のリンゴ、ニホンナシ、セイヨウナシを対象とした果実収穫ロボットのプロトタイプを開発したという。
市販化に向けて現地実証試験などを繰り返すことで安定性や正確性をさらに向上させる方針。加えて、ロボットを安全に利用できる仕組み作り、収穫物の自動積み下ろし機能など、周辺技術の開発を進める。

今後について、「実使用環境に耐えうる製品にしないといけない。2年はかかると考えており、2年後の実用化を目指していきたい」(デンソー FA事業部 FA開発室 AgTech開発課 課長 西野秀幸氏)と説明した。
CNET Japanの記事を毎朝メールでまとめ読み(無料)
 無限に広がる可能性
無限に広がる可能性
すべての業務を革新する
NPUを搭載したレノボAIパソコンの実力
 心と体をたった1分で見える化
心と体をたった1分で見える化
働くあなたの心身コンディションを見守る
最新スマートウオッチが整える日常へ
 CNET Japan Live 2025開催レポート
CNET Japan Live 2025開催レポート
イノベーションの「種」から社会実装へ--
社会課題の解決に挑む各社の挑戦

 メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
 なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
 AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
 パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
 野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
 「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
 「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
 物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
 「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
 培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
 過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
 通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
 「代理店でもコンサルでもない」I&COが企業の課題を解決する
「代理店でもコンサルでもない」I&COが企業の課題を解決する

 絶対に迷わずにiPhoneの電源を切る(シャットダウンする)方法
絶対に迷わずにiPhoneの電源を切る(シャットダウンする)方法 .jpeg) 性能の割に安いUSB充電器の動作が怪しいので分解したら「謎の塊」が入っていた話
性能の割に安いUSB充電器の動作が怪しいので分解したら「謎の塊」が入っていた話  「ストリートビュー」が捉えたクレイジーすぎる光景38連発
「ストリートビュー」が捉えたクレイジーすぎる光景38連発