神戸市と筑波大発の水中ドローンベンチャーFullDepthは、ダムの水中部調査と3次元画像化の実証実験を実施することを3月30日に発表した。これは、神戸市が2018年から展開しているスタートアップ提案型実証実験事業「Urban Innovation KOBE +P(アーバンイノベーション神戸プラスピー)」の一環(第8号)で、今春には神戸市内にある烏原ダムで、公開の実証実験を実施する予定だ。

国内のダムの多くは、ダム放流設備などの水中部における維持管理を人手に頼って実施してきた。潜水士が水中に潜り、目視点検や補修作業を行うのだ。しかし、少子高齢化で潜水士は減少傾向。水中での作業は非常に過酷で、常に危険をともなうため、安全性にも課題がある。また、潜水時間や潜水深度の制約もあるため、将来的にはロボティクスによる作業代替が必要だと考えられている。
このような背景の中、FullDepthは神戸市のUrban Innovation KOBE +Pに応募して採択された。これは、神戸市が、起業・スタートアップ支援を通じて市の経済活性化を図る目的で、最先端の技術を持つスタートアップと共同実験をして、社会・行政課題の解決を目指すというものだ。神戸市に限らず、「日本全国、他の自治体でも必要性がある」という点も評価された。
FullDepthは、神戸市水道局の協力を得て、自社開発の産業用水中ドローン「DiveUnit300」を使った実証実験を行う。場所は、神戸市内にある、現在休止中の烏原ダム(立ヶ畑ダム)。水中ドローンで、ダム堤体水中部の一定範囲を撮影し、映像のオルソ画像化(3次元化)を試みる。今春、現地で公開の実証実験を行う予定だ。

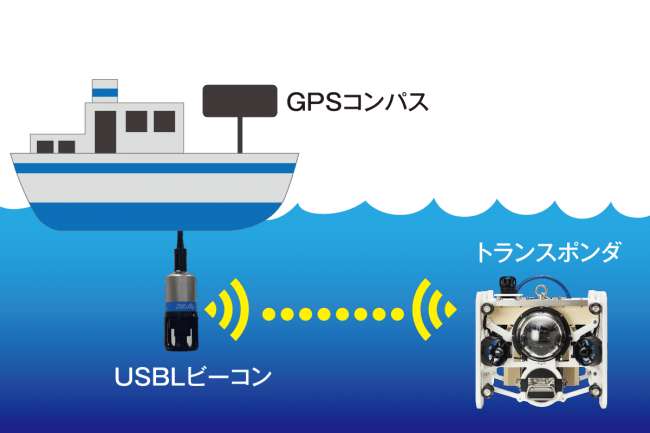
オルソ画像とは、撮影データを位置のずれがない画像に変換して、正しい位置情報を付与したものだ。水中はGPSが届かないため、ただ水中で構造物を撮影するだけでは、もし瑕疵が見つかったとしてもそれがどこなのか特定が難しい。DiveUnit300のUSBL音響測位装置や水中ドローン本体の姿勢情報などを用いることで、映像のオルソ画像化を図るという。
Full Depth代表取締役 COOの吉賀智司氏は、「将来的には、ダム堤体の水中部を1枚絵のオルソ画像にしたい。また、ダム堤体の陸上部をドローン空撮した3次元映像と結合して、水中から陸上まで一体になった構造物の画像データ取得を目指したい」と話す。
これにより、ダムなどのインフラ管理事業者は、構造物全体の前年との差分を検出するなど、経年変化を管理しやすくなるという。これまでのドローン点検は、水中と空中とで分けて語られてきたが、インフラを維持管理する事業者側の実運用効率を考えれば、“結合”の需要は高い。空のドローンサービスサプライヤーにとっても新たなビジネスチャンスといえよう。
実証実験の現段階について、吉賀氏は「神戸市さんと協働して、考えうるリスクを確認し、安全性を確認した段階。たとえば、水中でケーブルが引っかかる構造物がないかなど。水中は、水の濁りや浮遊物の影響で、連続したデータを撮影しづらいが、ライトの当て方や構造物との距離を一定に保つ方法など、試行錯誤を繰り返して改善を試みている。現地公開の実証実験にも、ぜひ足を運んでいただければ」と語った。
FullDepthは、点検映像の遠隔地配信機能を持つクラウドサービス「FullDepth Bridge」も提供しており、今後はクラウドで画像処理、解析・検出できるサービス展開も目指すという。他の自治体への展開も見据える神戸市との協業で、日本国内のダムの維持管理におけるロボティクス活用がいかに進むか、注目だ。
CNET Japanの記事を毎朝メールでまとめ読み(無料)
 心と体をたった1分で見える化
心と体をたった1分で見える化
働くあなたの心身コンディションを見守る
最新スマートウオッチが整える日常へ
 ひとごとではない生成AIの衝撃
ひとごとではない生成AIの衝撃
Copilot + PCならではのAI機能にくわえ
HP独自のAI機能がPCに変革をもたらす

 メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
 なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
 AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
 パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
 野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
 「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
 「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
 物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
 「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
 培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
 過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
 通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
 「代理店でもコンサルでもない」I&COが企業の課題を解決する
「代理店でもコンサルでもない」I&COが企業の課題を解決する

 AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は  「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた  絶対に迷わずにiPhoneの電源を切る(シャットダウンする)方法
絶対に迷わずにiPhoneの電源を切る(シャットダウンする)方法