
歩行するロボットが転倒するのを見るのは、気が滅入るものだ。私のせいで転倒するのであればなおさらだ。

私が立っているのはカリフォルニア州パサデナにあるラボで、二足歩行ロボットがたくさんいる。ある研究者に、トレッドミルを歩いている5フィート(約1.5m)の2脚ロボット「Amber」を転ばせてみるよう促された。ロボットは上部のレールにロープでつながれて所定の位置を歩くので、私が手荒なことをすると前か後ろに倒れてしまう。
ロボットに感情がないのはわかっていても、やはり残酷な気分だ。私は恐る恐る、Amberの右脚の前に手を突き出し、Amberがつまずいて足を踏み外すのを観察する。進路上にある障害物をうっかり蹴ってしまったような状況だ。驚いたことに、Amberは立ち直り、何事もなかったかのように、それまでと同じ着実なペースで歩き続けた。
次に、金属製の長い物差しで胴体を押す。Amberは再び元の体勢に戻った。
このプロセスは、卑劣に思えるかもしれないが、カリフォルニア工科大学(Caltech)のAMBER Labの研究者が妨害テストと呼ぶものだ。すべてはロボットの歩き方を理解するためなのだ。
われわれは、Boston Dynamicsのような企業のロボットが、走ったり、ジャンプしたり、さらにはパルクールを行ったりするのを見るのには慣れている。だが、AMBER Labのロボットは、派手な技を決めたりはしない。ラボの研究者は、ロボットの動き回り方を理解することによって、歩行困難な人やまったく歩けない人を助ける機器にその技術を直接適用できるようになる。
Caltechで機械工学および土木工学の教授を務め、AMBER Labを率いるAaron D. Ames博士は、「歩行やランニングなどの動作を実現するたび、われわれはそれを人工器官、そしていずれは対まひ患者向けの外骨格に搭載したいと考える」と述べている。同研究所の主な重点分野は、二足歩行ロボットの実験的研究だ。「歩行ロボットで採用しているのと同種のアルゴリズムによって、(対まひ患者が)起き上がって歩けるようにしたい」(Ames博士)
Ames博士とチームは、人間の動作をロボットに模倣または反映させようとするのではなく、ロコモーション(運動や移動)に関する数学を理解しようとしている。従って、ロボットが倒れても、研究チームは単にロボットの設定を調整することで修正を試みるのではない。「われわれは基礎科学に立ち返り、数学とアルゴリズムを通じて反復することで、もう一度やってみる」(Ames博士)
ロボットは液圧ではなく電気モーターを利用するため、細かい作動が可能になり、補助器具としての利用に一層適したものになる。
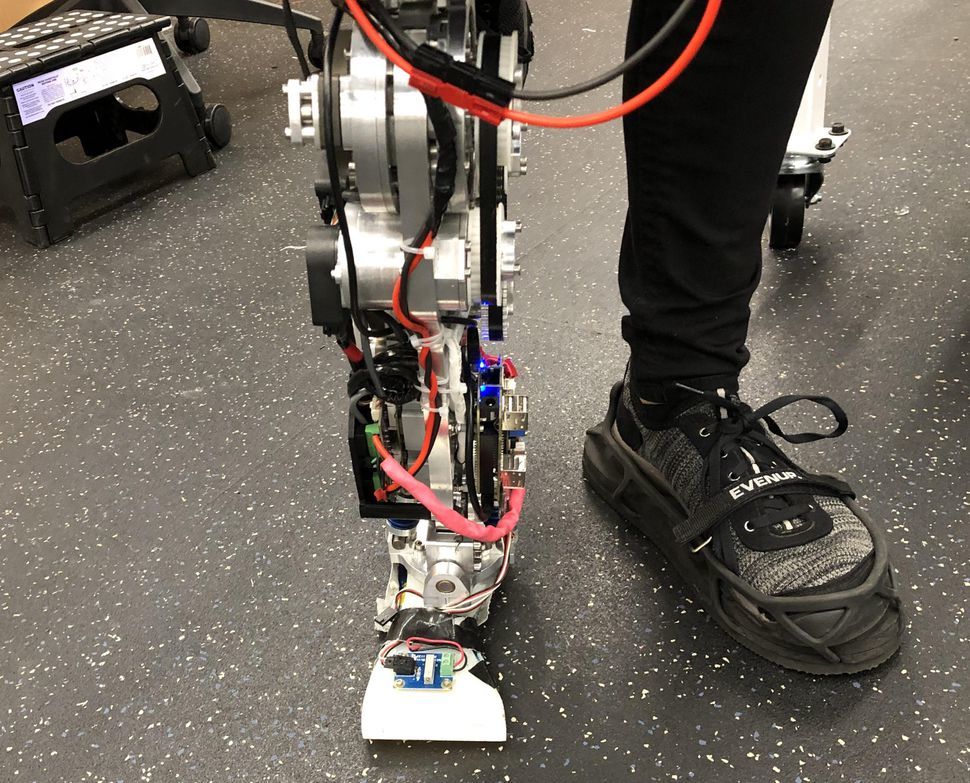
同研究所で開発された人工装具の1つが「Ampro 3」だ。これは動力大腿義足で、足首に2自由度を備え、既存の器具よりうまく歩けるように設計されている。私は博士課程の学生であるRachel Gehlhar氏に、Amproを装着して歩き回るとどんな感じか、実演してもらった。装着者の歩く速度に基づいて、慣性計測装置(IMU)が義足の動きを調節する。そのため、Gehlharさんが歩みを速めるとAmproも加速する。
私の訪問時には、4つの主要ロボットが開発中だった。防護用の柵に取り付けられたホッピング(跳躍)ロボット、Amber、Ampro、そしてロープにつながれていない状態で動く二足歩行ロボット「Cassie」だ。
この記事は海外CBS Interactive発の記事を朝日インタラクティブが日本向けに編集したものです。
CNET Japanの記事を毎朝メールでまとめ読み(無料)
 心と体をたった1分で見える化
心と体をたった1分で見える化
働くあなたの心身コンディションを見守る
最新スマートウオッチが整える日常へ
 ひとごとではない生成AIの衝撃
ひとごとではない生成AIの衝撃
Copilot + PCならではのAI機能にくわえ
HP独自のAI機能がPCに変革をもたらす
 プライバシーを守って空間を変える
プライバシーを守って空間を変える
ドコモビジネス×海外発スタートアップ
共創で生まれた“使える”人流解析とは

 メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
 なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
 AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
 パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
 野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
 「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
 「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
 物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
 「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
 培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
 過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
 通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
 「代理店でもコンサルでもない」I&COが企業の課題を解決する
「代理店でもコンサルでもない」I&COが企業の課題を解決する

 「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた  なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは  「ストリートビュー」が捉えたクレイジーすぎる光景38連発
「ストリートビュー」が捉えたクレイジーすぎる光景38連発