マサチューセッツ工科大学(MIT)コンピュータ科学および人工知能研究所(CSAIL)の研究チームは、地表を走行できるクアッドコプター型ドローンを開発した。自律ナビゲーションシステムを搭載し、障害物を自動的に回避しながらスタート地点から目的地まで自律移動できる。
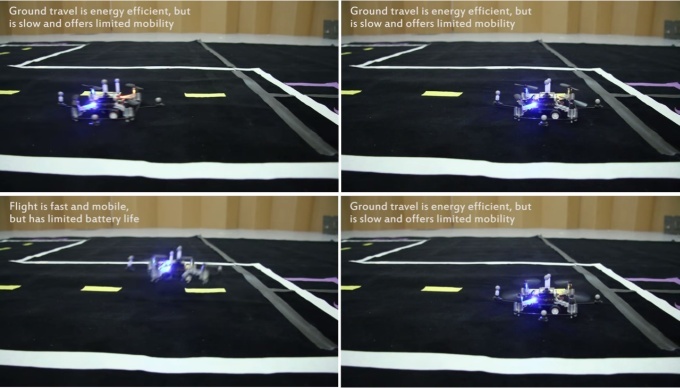
何らかの移動能力を持つロボットは、必ずしも万能でなく、移動方式によって得手不得手がある。例えば、空を飛ぶドローンは高速移動が可能で移動ルートの自由が高い一方、バッテリ駆動時間に制約があり、長距離の移動には向かない。また、地表を走る自動車型ロボットはエネルギー効率が高く遠くまで移動できるが、速度は遅く機動性に欠ける。
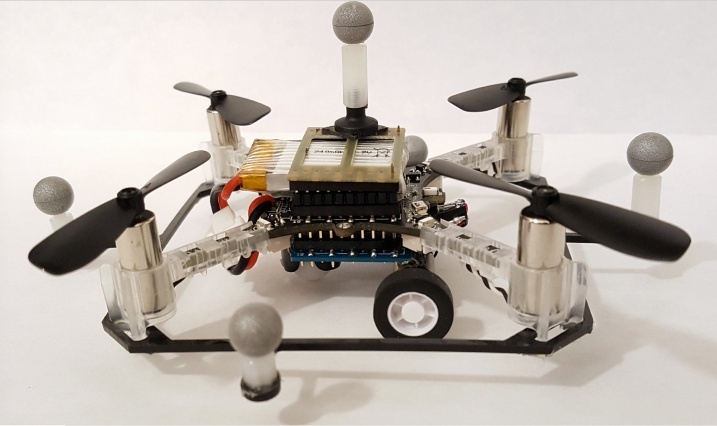
そこでMITの研究チームは、クアッドコプターの下部に小型モーター2つとタイヤを取り付け、地上走行も可能なドローンを開発。シミュレーション結果によると、フル充電したバッテリで飛行距離は90m、走行距離は252mになるという。走行用のモジュールを追加したため飛行距離は追加前に比べ14%短くなってしまうが、地表走行と組み合わせるとバッテリ効率は問題になるほど低下しないそうだ。
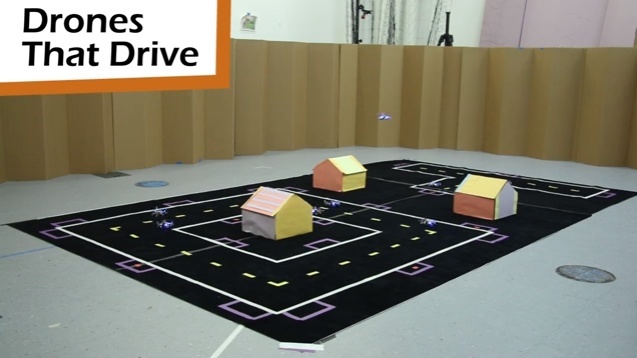
このドローンは障害物を避けながら移動する機能も備え、建物や道路、駐車場、飛行禁止地区、着陸エリアなどを含む市街地のような試験ルートを自律移動できた。研究チームは、このドローンが飛ぶことも走ることもできるため、障害物の多い環境でも飛び越えたり、逆に障害物の下をくぐったりして、効率的に移動可能としている。
今回開発したドローンは試験的なもので、人間を乗せられるほど強力かつ大型のモデルを実現させるには高いハードルがあるという。ただし、さまざまな条件下で最適な移動手段を選べるため、人命救助など多彩な応用が考えられる。
CNET Japanの記事を毎朝メールでまとめ読み(無料)
 ひとごとではない生成AIの衝撃
ひとごとではない生成AIの衝撃
Copilot + PCならではのAI機能にくわえ
HP独自のAI機能がPCに変革をもたらす
 心と体をたった1分で見える化
心と体をたった1分で見える化
働くあなたの心身コンディションを見守る
最新スマートウオッチが整える日常へ

 メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
 なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
 AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
 パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
 野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
 「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
 「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
 物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
 「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
 培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
 過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
 通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
 「代理店でもコンサルでもない」I&COが企業の課題を解決する
「代理店でもコンサルでもない」I&COが企業の課題を解決する

.jpeg) 性能の割に安いUSB充電器の動作が怪しいので分解したら「謎の塊」が入っていた話
性能の割に安いUSB充電器の動作が怪しいので分解したら「謎の塊」が入っていた話  なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは  「ストリートビュー」が捉えたクレイジーすぎる光景38連発
「ストリートビュー」が捉えたクレイジーすぎる光景38連発