JR東日本とKDDIは1月10日、JR目黒MARCビルにおいて、フードデリバリーサービスの実証実験を開始すると発表した。
期間は1月11~27日で、防犯カメラの映像データをAIで分析しつつ、配送ロボットが自動で混雑を回避して商品を届ける。JR目黒MARCビル内のオフィスワーカー向けに、エキュート品川で取り扱うお弁当を配送するサービスと、お菓子などを回遊販売するサービスを試験的に提供する予定だ。

お弁当の配送サービスでは、オフィスワーカーが事前にウェブサイトから予約したお弁当をエキュート品川から配送。JR目黒MARCビル到着後に配送ロボットに詰め込み、オフィスフロアまで配送する。

取り扱うお弁当は週替わりで、1月11~13日はイーションが999円(税込)で販売する「炙り!ノルウェー産 サーモンのハラス蒲焼重」、1月16~20日は日本橋だし場 OBENTOが980円で販売する「だしわっぱ飯」、1月23~27日は塚田農場 OBENTO&DELIが1150円で販売する「北海道産黒牛100% 黒牛バーグ弁当」になるという。

お弁当の配送サービスと回遊サービスはいずれも、商品の受け取りに2次元コードを活用する。2次元コードを読み込んだ後に扉が開き、商品を受け取れるという仕組みだ。

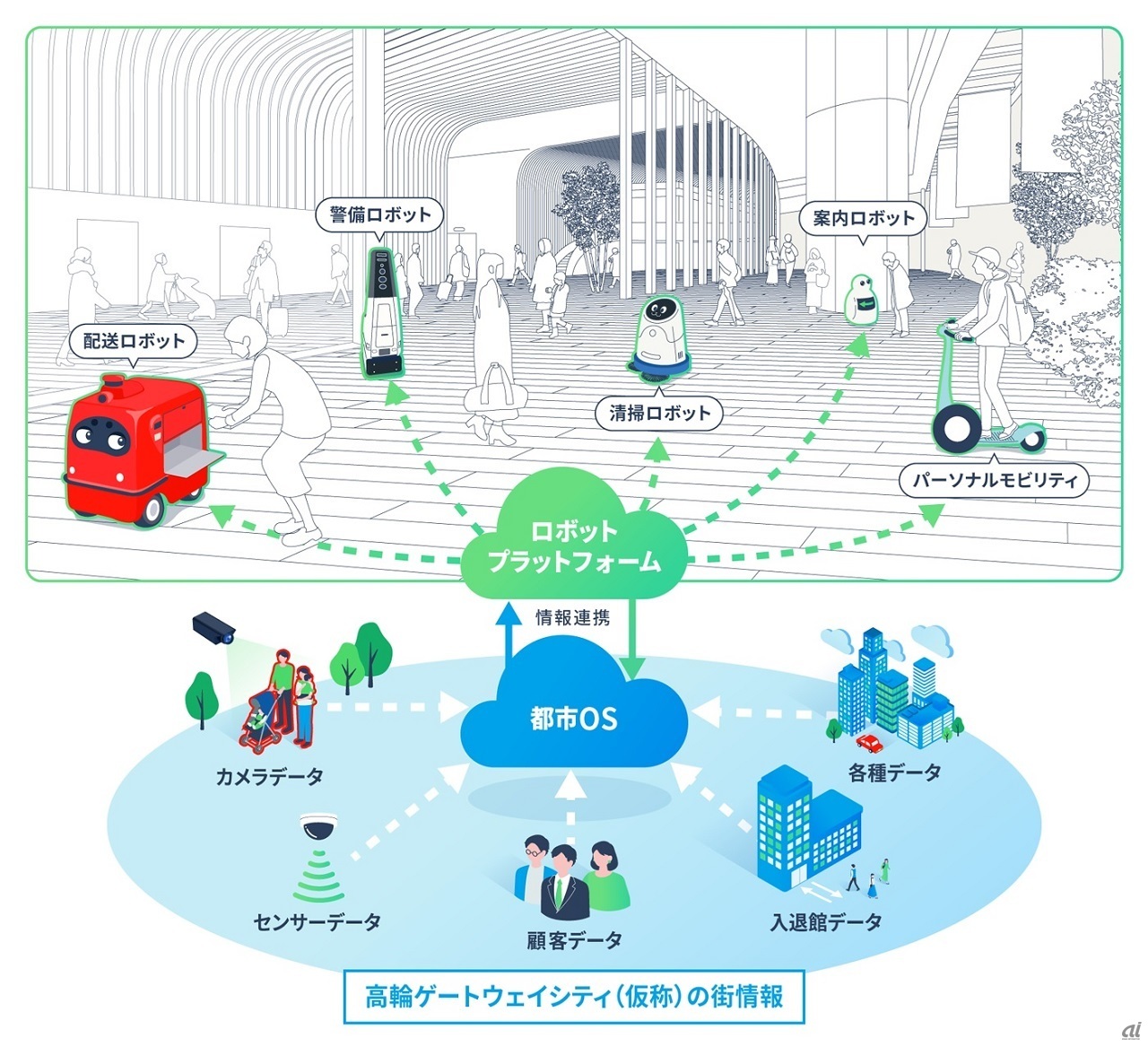
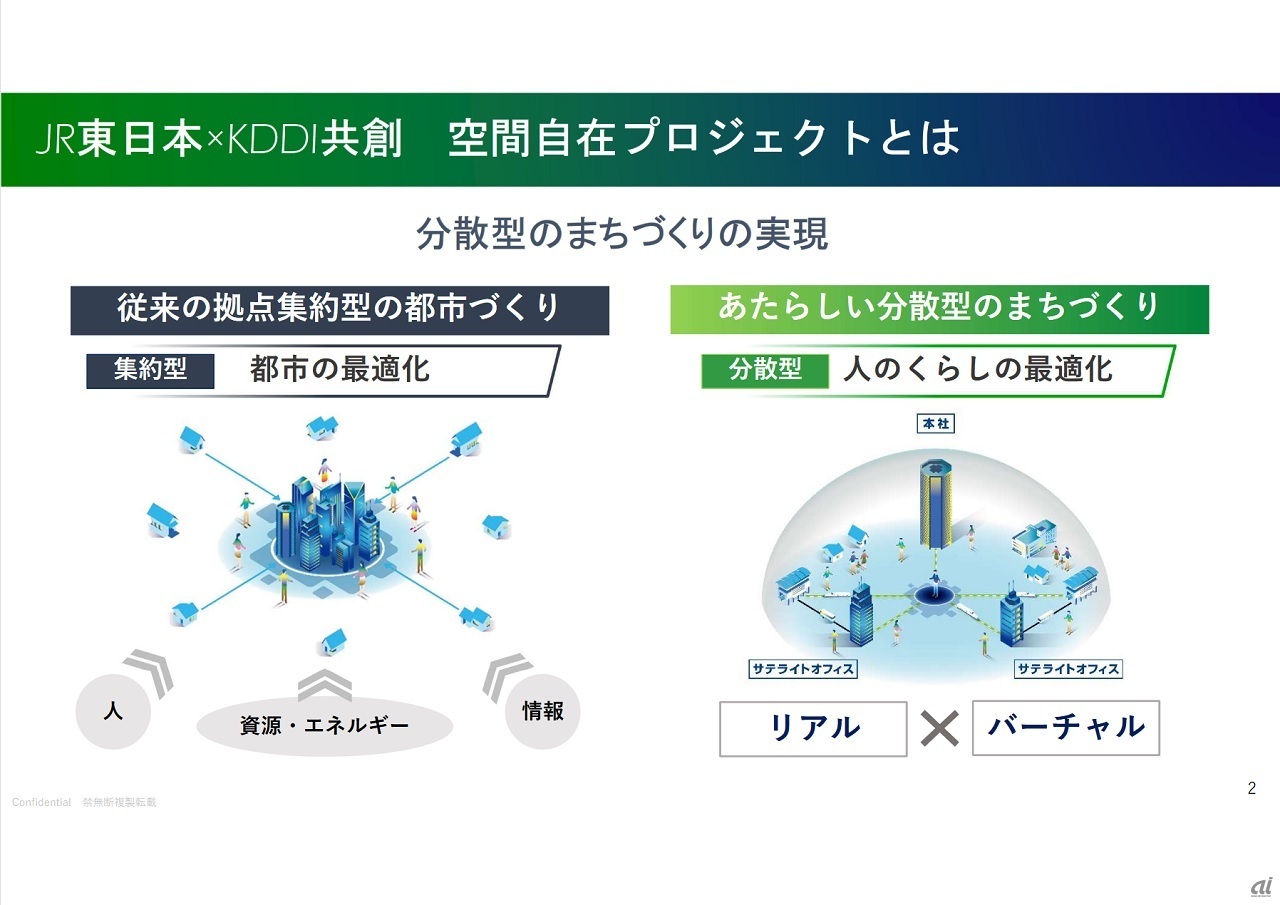
JR東日本とKDDIは、「高輪ゲートウェイシティ(仮称)」のまちづくりを中心に場所や時間にとらわれない働き方、くらし方を創出する「空間自在プロジェクト」に取り組んでいる。
ビルに設置している防犯カメラといった都市や街の設備が持つデータを収集、分析するデータ連動基盤「都市OS」と、ロボットの位置情報管理や走行の制御、設備との連携を実施するロボットプラットフォームを連携させ、ロボット単独ではできなかった高度なサービスの実現、利用者の需要に柔軟に対応できる環境の構築を目指しているという。
今回の実証実験は空間自在プロジェクトの一環で、3つの項目を検証する。1つ目は「人の密集検知による走行ルートの選択」で、防犯カメラの映像を都市OSがAIで解析するとともに、連携するロボットプラットフォームが最適なルートを選択してロボットに指示。配送サービスでは密集を回避するルートを、回遊販売では密集度が高いルートを走行できるか検証するという。
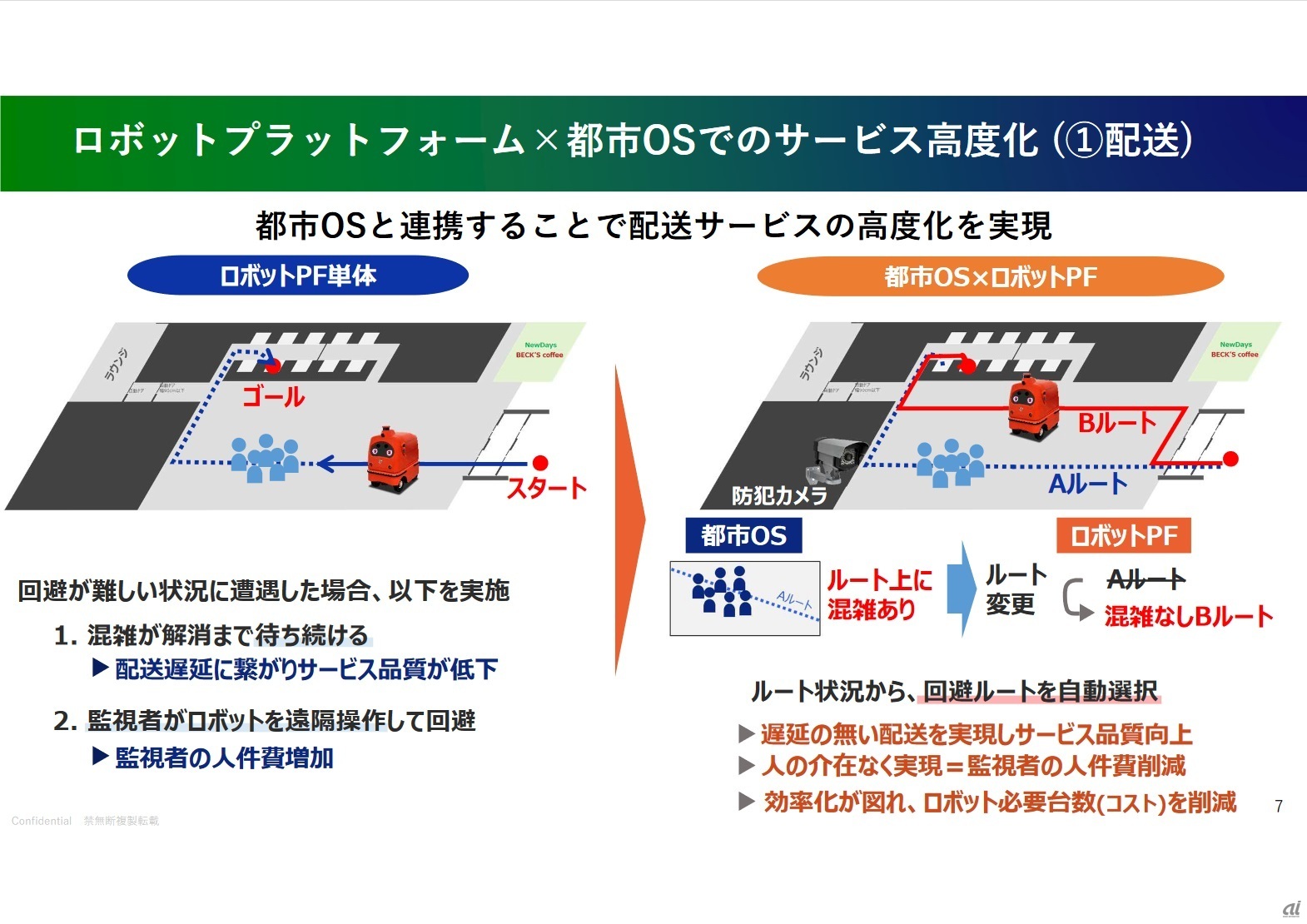
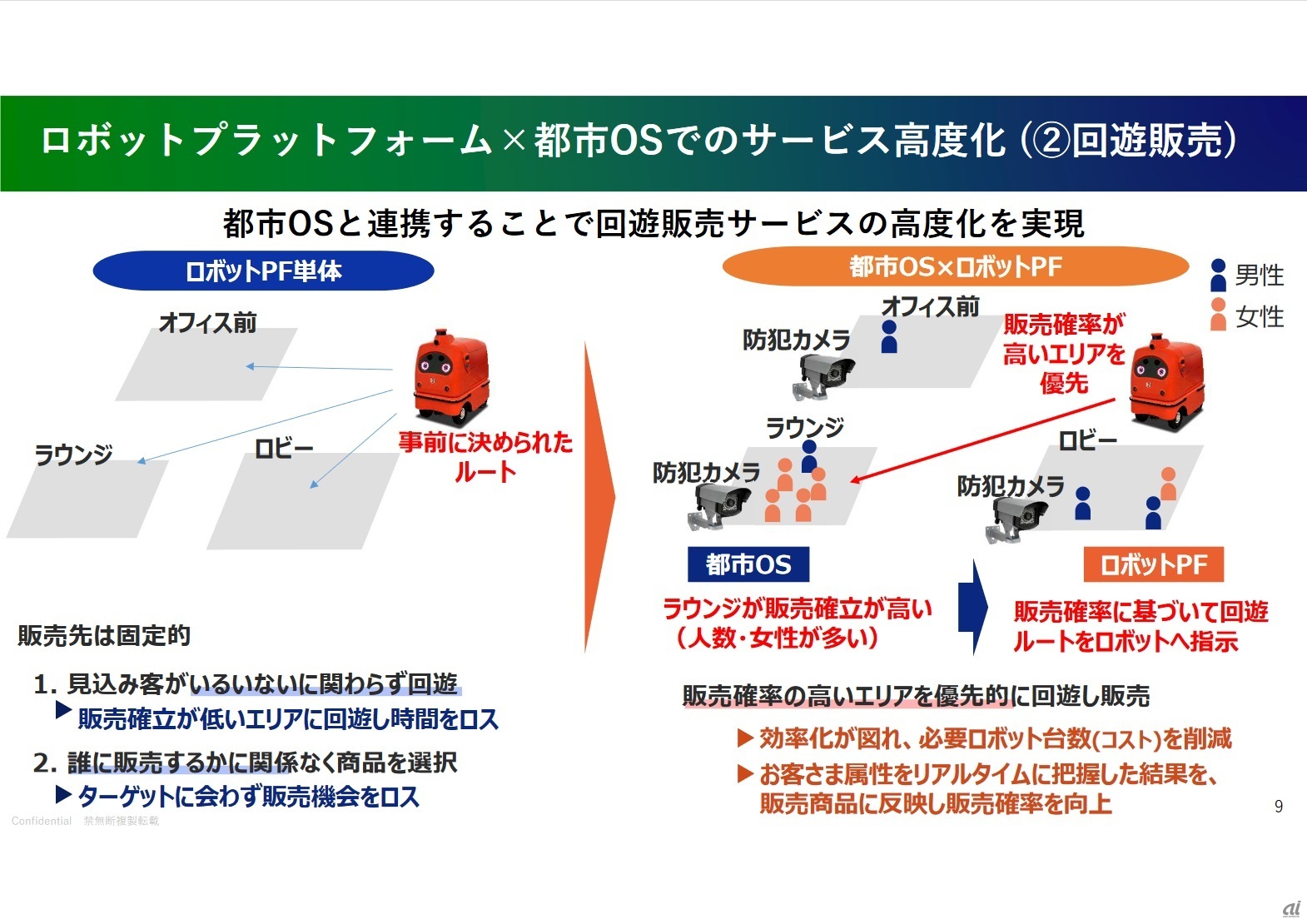
将来的には人の密集度に加えて購買データなどのさまざまなデータと連携させ、サービスの需要に合わせた効率的なルート選択の実現を目指すとしている。
2つ目は、「メーカーが異なる複数ロボットの協調制御」。ZMPの配送ロボット「DeliRo」とセントラル警備保障の警備ロボット「C-SParX」というメーカーが異なるロボットがエントランスロビーで稼働するなか、配送ロボットの走行を優先する協調制御ができるかを検証するという。
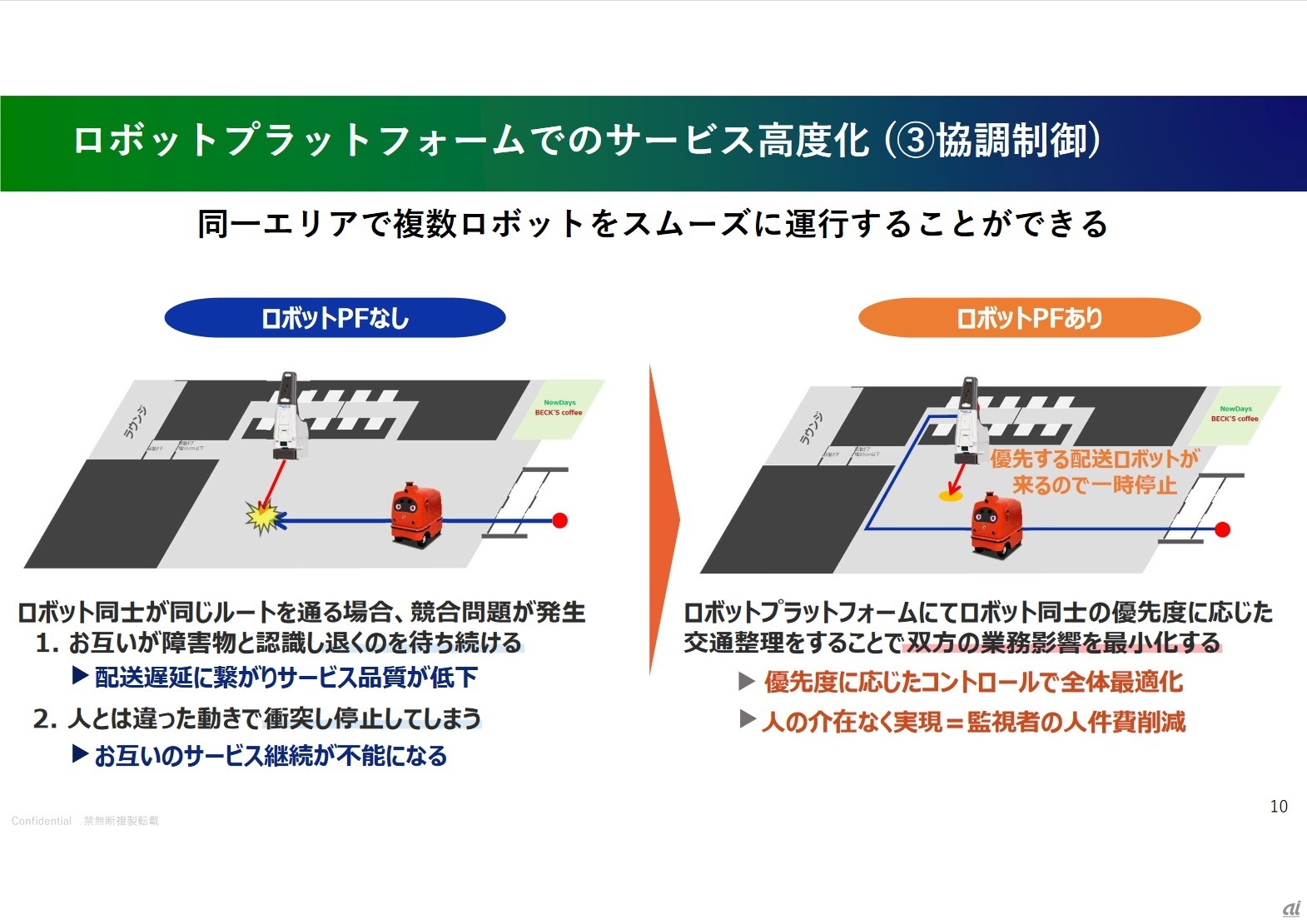
警備ロボットが配送ロボットを優先して一時停止したところ
複数ロボットの協調制御の検討を深度化し、将来的にはさまざまなメーカーのロボットが自由に走行できるまちづくりを目指すとしている。
3つ目は、「ロボットプラットフォームとエレベーターの連携」。ロボットが人の介在なくエレベーターを利用し、異なるフロアへ配送できるかを検証するという。
エレベーターからロボットから降り、ユーザーがお弁当を受け取るところ
今回実証するサービスは、高輪ゲートウェイシティの街開きを予定している、2025年3月の実装を目指している。
JR東日本 マーケティング本部 マネージャー 松尾俊彦氏は、「従来の“都市”を中心とした拠点集約型ではなく、“暮らし”を軸としたまちづくりを目指している。例えば、子育てをしている方が子育てしやすい環境で働き、学び、医療サービスを受けることができる。リアルの鉄道とオンラインのKDDIのタッグで、そういった新しい暮らし方を実現したい」と語った。

CNET Japanの記事を毎朝メールでまとめ読み(無料)
 心と体をたった1分で見える化
心と体をたった1分で見える化
働くあなたの心身コンディションを見守る
最新スマートウオッチが整える日常へ
 ひとごとではない生成AIの衝撃
ひとごとではない生成AIの衝撃
Copilot + PCならではのAI機能にくわえ
HP独自のAI機能がPCに変革をもたらす

 メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
 なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
 AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
 パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
 野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
 「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
 「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
 物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
 「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
 培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
 過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
 通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
 「代理店でもコンサルでもない」I&COが企業の課題を解決する
「代理店でもコンサルでもない」I&COが企業の課題を解決する

 絶対に迷わずにiPhoneの電源を切る(シャットダウンする)方法
絶対に迷わずにiPhoneの電源を切る(シャットダウンする)方法 .jpeg) 性能の割に安いUSB充電器の動作が怪しいので分解したら「謎の塊」が入っていた話
性能の割に安いUSB充電器の動作が怪しいので分解したら「謎の塊」が入っていた話  「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた