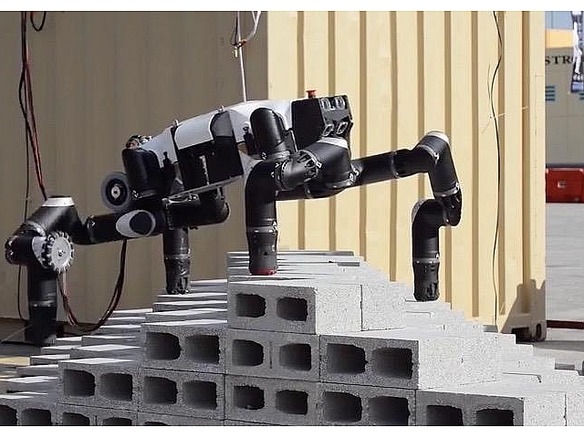
すべてのロボットが戦争や破壊のために造られているとは限らない。2015年のDARPA Robotics Challenge(DRC)でカリフォルニア大学サンタバーバラ校助教のKatie Byl氏率いるロボティクス研究所チームが披露した「RoboSimian」は、救助活動を目的として開発されたサルのような多脚ロボットだ。
つまずくと酔っ払いのように転ぶ二足歩行の人型ロボットとは異なり、RoboSimianは4本の脚を使ってバランスと強度を発揮できるようになっている。「Tested」というチャネルで公開されている動画でByl氏は「救助の場面で何が必要になるかを考えると、安定性といった点になる」と語っている。
RoboSimianの4つ脚は、歩いたり上ったりするためだけのものではない。これらの脚は、道具を持って複雑な作業をすることもできる。またRoboSimianは、自動車の運転も可能だ。
ただし、ロボットの脚には3組の関節があるので、大股で進む場合はこれらを伸ばして脚を広げる必要がある。したがってRoboSimianは、地面を移動するときに記録的なスピードを出せるわけではない。「このロボットは、ゆっくりと慎重に移動するが、行く手に何か障害物がある場合、ほかの一部のロボットとは違って力があるので、進路からその障害物を押し出すことができる」(Byl氏)
参加した多くのロボティクスチームが、特にDRCの障害物コースやさまざまな作業を習得できるロボットを開発したのに対し、「われわれは、救助活動の場で実際に役立つことは何かを考えてこのロボットを設計した」とByl氏は述べている。
RoboSimianが逃げ出して本物のウルトロンになるのではないかと人々を不安にさせないように、この頼もしいロボットは今まで通り人の手でかなり制御されるようになっている。自律せず、人工知能も使用しない。人間のオペレーターがRoboSimianに指示を出し、RoboSimianはその情報をもとに、目の前にある作業を完了する。
この記事は海外CBS Interactive発の記事を朝日インタラクティブが日本向けに編集したものです。
CNET Japanの記事を毎朝メールでまとめ読み(無料)
 ひとごとではない生成AIの衝撃
ひとごとではない生成AIの衝撃
Copilot + PCならではのAI機能にくわえ
HP独自のAI機能がPCに変革をもたらす
 プライバシーを守って空間を変える
プライバシーを守って空間を変える
ドコモビジネス×海外発スタートアップ
共創で生まれた“使える”人流解析とは
 心と体をたった1分で見える化
心と体をたった1分で見える化
働くあなたの心身コンディションを見守る
最新スマートウオッチが整える日常へ

 メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
 なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
 AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
 パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
 野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
 「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
 「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
 物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
 「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
 培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
 過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
 通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
 「代理店でもコンサルでもない」I&COが企業の課題を解決する
「代理店でもコンサルでもない」I&COが企業の課題を解決する

.jpeg) 性能の割に安いUSB充電器の動作が怪しいので分解したら「謎の塊」が入っていた話
性能の割に安いUSB充電器の動作が怪しいので分解したら「謎の塊」が入っていた話  「ストリートビュー」が捉えたクレイジーすぎる光景38連発
「ストリートビュー」が捉えたクレイジーすぎる光景38連発  AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は