
KDDI、ゼンリン、富士通は12月26日、完全自動運転時代の「ダイナミックマップ」生成に必須技術となる大容量データの情報収集と、自動運転車へのマップ配信技術の実証実験を、2018年1月に開始すると発表した。
ダイナミックマップは、車の自動運転や運転支援システムに必要となる高精度の3次元情報を持つデジタル地図。静的な地図情報に加え、工事や事故、渋滞などの更新頻度の高い動的情報を、時間変化の度合い別に複数層に分けて管理し、それらを連携して自車の周辺状況を含んだ地図情報をリアルタイムに生成する方法が検討されている。国内では、内閣府主導で官民が連携し、ダイナミックマップの構築に取り組んでいる。
自動運転車の安全な走行を実現するには、自車位置把握のためのさまざまな道路構造物情報の正確な把握と、気象情報や事故・渋滞情報などの動的情報を取得して組み合わせるダイナミックマップの生成が必要になる。しかし、ダイナミックマップには、自車の走行経路を認識しながら遠方の道路状況をリアルタイムにフィードバックするシステムの構築が欠かせない。
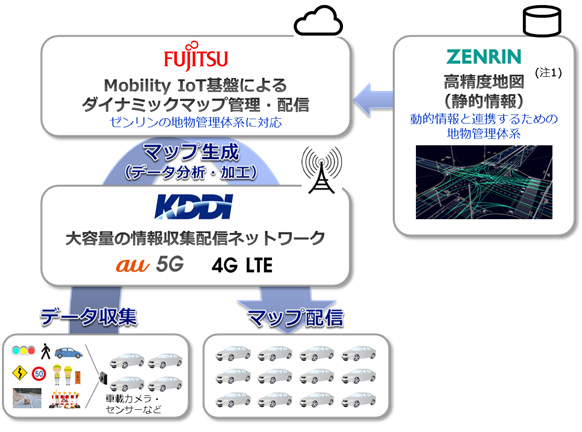
そこで3社は、ダイナミックマップのためのデータ収集・生成・配信基盤を構築。この基盤において、動的情報と道路構造物の高精度地図を連携させてデータ生成する処理性能や配信に要する時間などを検証する。実証実験においては、4G LTEおよび次世代移動通信システム「5G」の活用を検討するという。
実証実験において、KDDIは一定間隔で生成される車載カメラやセンサのデータを確実かつ効率的にアップロードするための車載通信モジュールとネットワークの検証を実施。また、逐次アップデートが必要な動的情報や地図データの差分情報などを必要とする、対象車輌に確実かつ、セキュアに配信する方式と最適なネットワークの検証を行う。
ゼンリンは、動的情報との連携や逐次・差分更新を可能とする高精度地図データの提供および、提供プラットフォーム「ZGM Auto」の検証を行う。富士通は、コネクテッドカーから得られるプローブデータなど大量の動的情報を収集し、高精度地図と動的情報の紐付けや車両へのリアルタイムデータ配信などを行うMobility IoT基盤のダイナミックマップ管理機能を提供する。
CNET Japanの記事を毎朝メールでまとめ読み(無料)
 CES2024で示した未来
CES2024で示した未来
ものづくりの革新と社会課題の解決
ニコンが描く「人と機械が共創する社会」
 脱炭素のために”家”ができること
脱炭素のために”家”ができること
パナソニックのV2H蓄電システムで創る
エコなのに快適な未来の住宅環境
 ビジネスの推進には必須!
ビジネスの推進には必須!
ZDNET×マイクロソフトが贈る特別企画
今、必要な戦略的セキュリティとガバナンス
 データ統合のススメ
データ統合のススメ
OMO戦略や小売DXの実現へ
顧客満足度を高めるデータ活用5つの打ち手


 写真で見る「Ai Pin」--手のひらに投影できるウェアラブルAIデバイス
写真で見る「Ai Pin」--手のひらに投影できるウェアラブルAIデバイス .jpeg) 存在しないはずの「ターミナル0」が羽田に出現、なぜ?--異業種連携で「未来の空港」を研究開発へ
存在しないはずの「ターミナル0」が羽田に出現、なぜ?--異業種連携で「未来の空港」を研究開発へ  テレビを持たない若者たち--新たな体験で変化の兆しも
テレビを持たない若者たち--新たな体験で変化の兆しも