日産自動車は12月2日、日産グローバル本社ギャラリーで開催される「NISSAN FUTURES」において、宇宙航空研究開発機構(JAXA)と共同で研究する月面ローバ(探査車)の試作機を公開したと発表した。
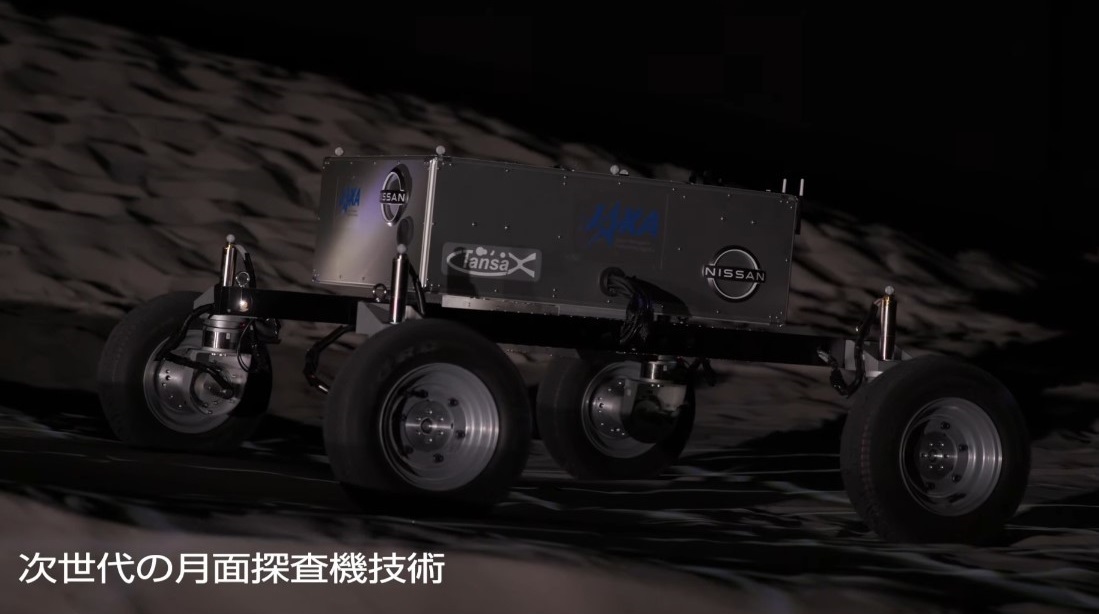
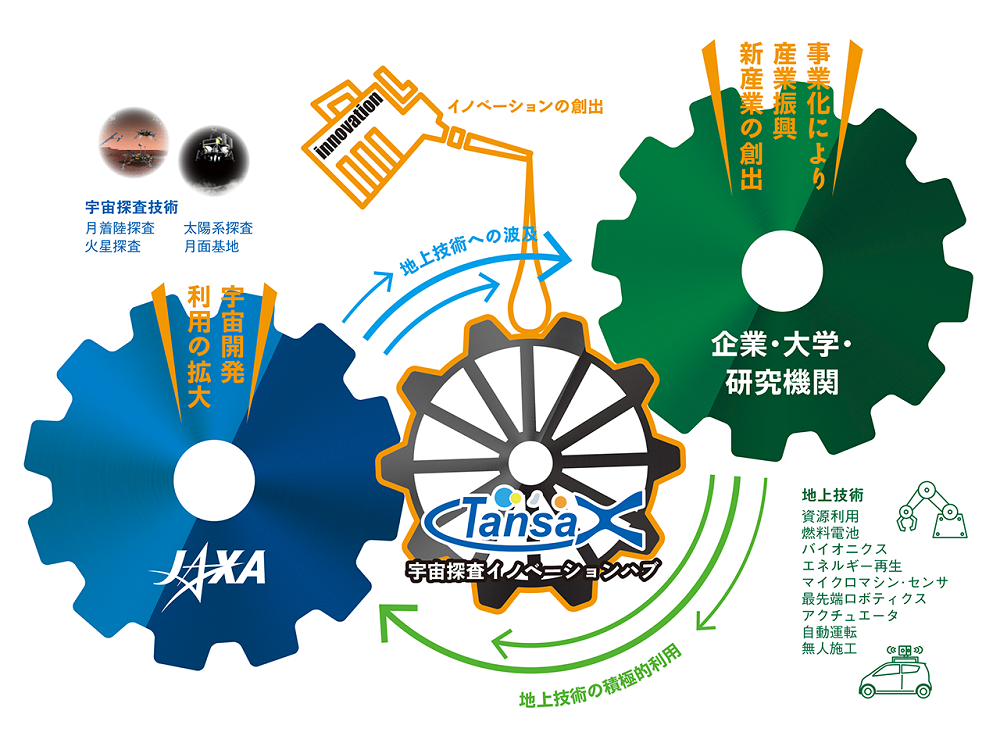
さまざまな異分野の人材、知識を集めた組織を構築し、これまでにない新しい体制や取組でJAXA全体に宇宙探査に係る研究の展開や定着を目指す「宇宙探査イノベーションハブ」では、宇宙探査に必要な技術のひとつとして月面ローバの研究を実施している。
月面は、砂地で覆われ、起伏に富んだ場所が多く、過酷な環境下にある。また、走行用のエネルギーも限られていることから、月面ローバには高い走破性や、高効率な走行性能が求められている。
日産自動車は、2020年1月から共同研究に参画。「日産リーフ」に代表される電気自動車の開発で培ってきたモーター制御技術と、「日産アリア」に搭載される電動駆動4輪制御技術「e-4ORCE」を応用し、月面ローバの駆動力制御に関してJAXAとともに研究を進めているという。
特に、独自技術となるe-4ORCEは、電動駆動ならではの4輪制御技術で、どのような環境下においてもドライバーが安心して運転できるだけでなく、車両姿勢を制御することにより同乗者にも快適な乗り心地を提供できるとしている。
JAXAとの共同研究では、このe-4ORCEをさらに進化させ、砂地などの過酷な環境下での走行性能を高める技術を開発している。
路面状況に応じてタイヤの空転量を最小限に抑えられれば、砂地でのスタック(脱出困難な状態)を回避できるだけではなく、空転によるエネルギーロスの最小化にもつながり、結果として走行エネルギーを効率化できるようになる。
過酷な環境での走行性能の向上、走行エネルギーを効率化する技術の開発は、月面で走るローバだけでなく、地上で走るクルマなど、さまざまな路面環境の走行性能も向上させるという。
同社では、共同研究を通じ、テストカーの開発で得た知見と、ローバの研究で得られたJAXAの知見を互いに共有することで、地上を走行するクルマと宇宙探査の両面で技術を進化させることを目指す。
CNET Japanの記事を毎朝メールでまとめ読み(無料)
 議事録作成もデジタル変革!
議事録作成もデジタル変革!
地味ながら負荷の高い議事録作成作業に衝撃
使って納得「自動議事録作成マシン」の実力
 無限に広がる可能性
無限に広がる可能性
すべての業務を革新する
NPUを搭載したレノボAIパソコンの実力
 川崎重工が目指す共創の在り方
川崎重工が目指す共創の在り方
「1→10」の事業化を支援する
イノベーション共創拠点の取り組みとは
 進化し続ける挑戦
進化し続ける挑戦
NTT Comのオープンイノベーション
「ExTorch」5年間の軌跡

 メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
メルカリが「2四半期連続のMAU減少」を恐れない理由--日本事業責任者が語る【インタビュー】
 なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
 AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
 パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
パラマウントベッド、100人の若手が浮き彫りにした課題からCVCが誕生
 野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
野村不動産グループが浜松町に本社を「移転する前」に実施した「トライアルオフィス」とは
 「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
「ChatGPT Search」の衝撃--Chromeの検索窓がデフォルトで「ChatGPT」に
 「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
「S.RIDE」が目指す「タクシーが捕まる世界」--タクシー配車のエスライド、ビジネス向け好調
 物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
物流の現場でデータドリブンな文化を創る--「2024年問題」に向け、大和物流が挑む効率化とは
 「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
 培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
培養肉の課題は多大なコスト--うなぎ開発のForsea Foodsに聞く商品化までの道のり
 過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
過去の歴史から学ぶ持続可能な事業とは--陽と人と日本郵政グループ、農業と物流の課題解決へ
 通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
通信品質対策にHAPS、銀行にdポイント--6月就任のNTTドコモ新社長、前田氏に聞く
 「代理店でもコンサルでもない」I&COが企業の課題を解決する
「代理店でもコンサルでもない」I&COが企業の課題を解決する

 「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた
「ビットコイン」に資産性はあるのか--積立サービスを始めたメルカリ、担当CEOに聞いた  なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは
なぜPayPayは他のスマホ決済を圧倒できたのか--「やり方はADSLの時と同じ」とは  AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は
AIが通訳するから英語学習は今後「オワコン」?--スピークバディCEOの見方は