続いて、いのはな電子工房の猪鼻治行氏が「里山のロボット2~高精度GPS制御ROBOT~」と題した講演を行い、圃場で正確にロボットなどを動かすためのGPS制御と、それを活用したロボットについて紹介した。

GPSは衛星からの電波だけで位置を補足すると10m程度の誤差が生じてしまうが、携帯電話基地局などを利用して補正する「ディファレンシャルGPS」を用いると50cm程度まで精度を高められる。
GPSは衛星から電波が飛んでくる時間の違いを測って、自分の位置を計算する。猪鼻氏が開発した高精度GPS制御ロボットに用いている「RTK-GPS」は、さらにその上を行くものだと説明した。
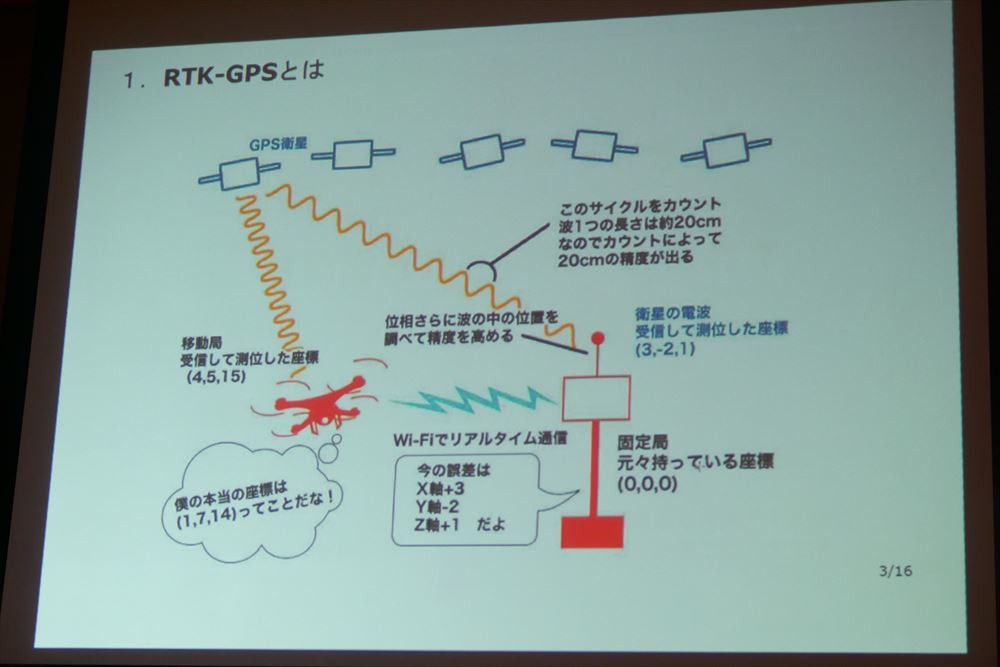
「GPSの電波には『位相』と呼ばれる模様がある。1.5GHzのGPSの電波はその波長が約20cmで、これが360度に相当する。例えばドローンと固定局の位相が90度違っていたら、360度の4分の1で5cmの違いがある。位相情報を見ると、数cmの精度で自分の位置が分かるのがRTK-GPSの原理」(猪鼻氏)
いのはな電子工房に電子基準点と呼ばれる固定局を設置し、そこを基準にすることでGPS測位時の揺らぎを解消するという。
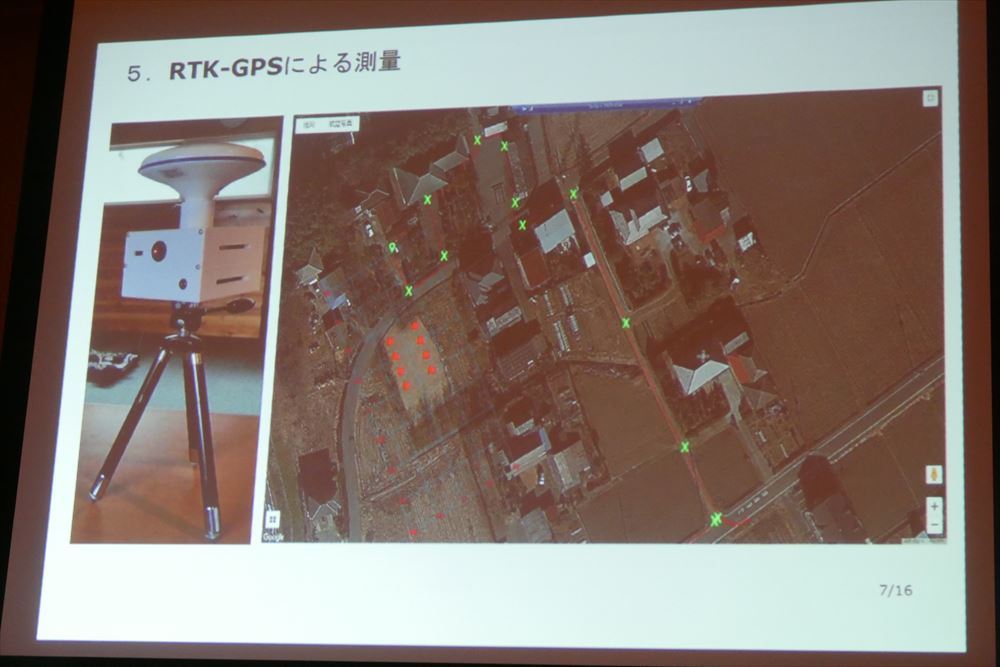
「スタティックモードと呼ばれるモードの場合、1〜2mmと、測量などで使うレベルの精度が出る。ロボットの場合は精度が落ちるが、それでも数cm程度の精度は出る」(猪鼻氏)
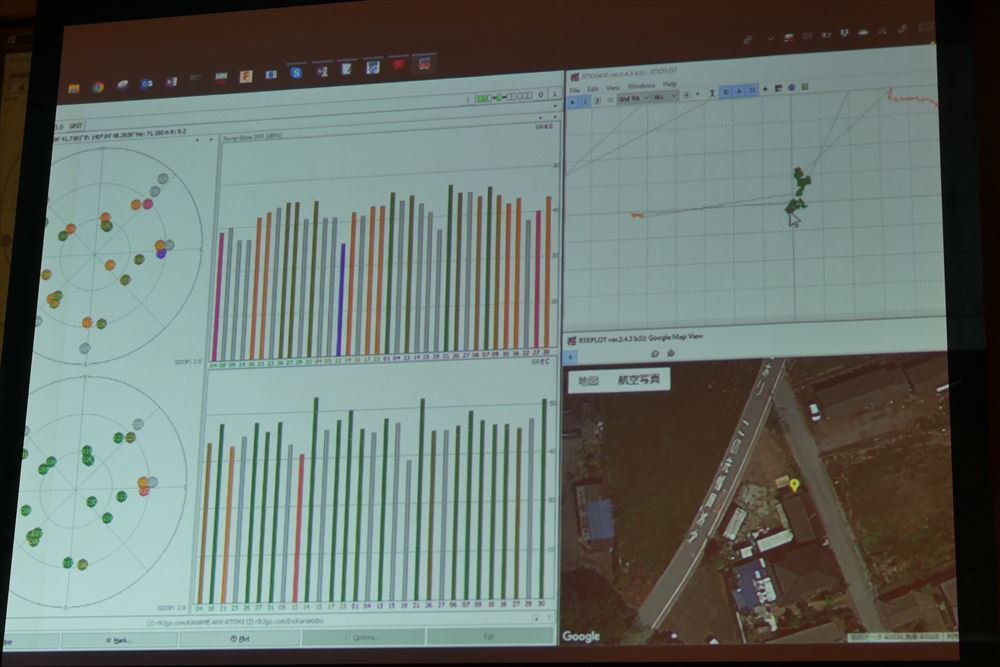
以前のRTK-GPSの測位はPCを用いる必要があったが、現在はRTKの分析が可能なチップが市販されており、Raspberry PiやArduinoなどの組み込み機器で利用できる。
いのはな電子工房で開発した高精度GPS制御ロボットは、ある施設内における各ポイントで照度を計測するというもの。一部屋根のある場所でのGPS測位に不安を持ったものの、テストをしたところ問題なく精度の高い測位が可能だったと猪鼻氏は語った。
猪鼻氏が開発した高精度GPS制御ロボットは農業用に開発したものではないが、かわごえ里山イニシアチブ代表理事の増田氏は「田植えロボットや、ラジコン機で試作した『除草水上艇』のコントロールに用いることができるのではないか」と話していた。
CNET Japanの記事を毎朝メールでまとめ読み(無料)
 誰でも、かんたん3D空間作成
誰でも、かんたん3D空間作成
企業や自治体、教育機関で再び注目を集める
身近なメタバース活用を実現する
 データ統合のススメ
データ統合のススメ
OMO戦略や小売DXの実現へ
顧客満足度を高めるデータ活用5つの打ち手
 CES2024で示した未来
CES2024で示した未来
ものづくりの革新と社会課題の解決
ニコンが描く「人と機械が共創する社会」
 ビジネスの推進には必須!
ビジネスの推進には必須!
ZDNET×マイクロソフトが贈る特別企画
今、必要な戦略的セキュリティとガバナンス


 2024年、スマートウォッチはどう変わる?--AI機能強化、デザインも変化か
2024年、スマートウォッチはどう変わる?--AI機能強化、デザインも変化か  レトロかわいいAIデバイス「rabbit r1」を体験--新たなトレンドを作れるか?
レトロかわいいAIデバイス「rabbit r1」を体験--新たなトレンドを作れるか?  シャオミ初のEV「SU7」、MWCに登場
シャオミ初のEV「SU7」、MWCに登場