~オープンデータ活用とシミュレーション環境構築支援の機能を強化~
株式会社フォーラムエイト(本社:東京都港区港南2-15-1、社長:伊藤裕二、URL:リンク)は、3DVRシミュレーションソフト UC-win/Road Ver.17をリリースしました。
UC-win/Road(2000年初版リリース)は、都市・交通計画や自動運転研究等の幅広い分野で活用されており、2002年にソフトウェア・プロダクト・オブ・ザ・イヤー(経産省他後援)を受賞、2019年にオープンデータ連携によるVRプラットフォームの取り組みで第8回ものづくり日本大賞 経済産業大臣賞を受賞しています。
今回の改訂では、CityGMLや浸水ナビなどのオープンデータ活用や、モビリティなどのシミュレーション環境構築を支援する機能に対応しており、UC-win/Roadをプラットフォームとした大規模デジタルツイン構築支援をいっそう強化するものとなっています。
【主な機能改訂】
CityGMLデータ出力
LOD1~2の建築物モデル、LOD1レベルの道路・地形モデルなどの出力に対応。PLATEAUからのCityGMLを読み込んだ場合はもとの情報をそのまま再出力可能。
[画像1: リンク ]
[画像2: リンク ]
浸水ナビデータインポート
津波プラグインに国土交通省の浸水ナビから浸水データをダウンロードし、可視化シミュレーション。時間に沿った水位変化確認やグラデーションによる可視化など、リアルな水面の表現が可能。
[画像3: リンク ]
[画像4: リンク ]
交通解析VISSIM2023連携
UC-win/RoadとVISSIMが異なるPC上にある場合にも連携可能。また、クラスター連携においてマスターPCがVISSIM連携を行った場合、マルチユーザークライアントの運転車両もVISSIMに送信。
[画像5: リンク ]
[画像6: リンク ]
Python Interface(COM API)対応
ドライビングシミュレータの制御やモデル/キャラクターのリアルタイム制御、メイン画面の視点制御、リボンメニュー項目やボタンの制御などの機能へのアクセスに対応し、UC-win/Roadとの連携プログラムを効率的に作成可能。
道路編集機能改良
Undo・Redo機能や道路線形の保存・読込機能など、道路モデリングを効率よく行うための機能に対応。
LKA(Lane Keeping Assist)機能
運転シミュレーションにおいて車線逸脱防止システムの動きを表現する機能に対応。HMI(ヒューマンマシンインターフェース)や交通安全の研究開発等に活用可能。
[画像7: リンク ]
[画像8: リンク ]
【関連情報】
▼UC-win/Road 製品情報 新機能
リンク
▼プレスリリース:第8回ものづくり日本大賞 経済産業大臣賞を受賞
リンク
▼UC-win/Road ソフトウェア・プロダクト・オブ・ザ・イヤー2002受賞
リンク
プレスリリース提供:PR TIMES リンク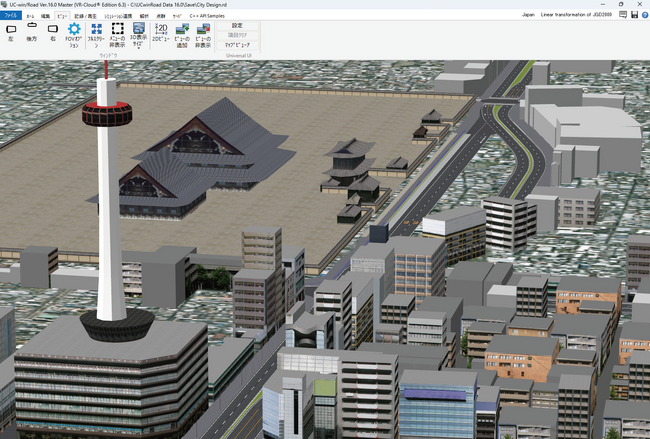
御社のプレスリリース・イベント情報を登録するには、ZDNet Japan企業情報センターサービスへのお申し込みをいただく必要がございます。詳しくは以下のページをご覧ください。

