ミシガン大学の研究チームは、自動運転車に対するサイバー攻撃として、距離計測センサーのLiDAR(ライダー)に偽情報を送り込む手法を考案した。実在しない障害物が存在するかのように見せることで、自動運転車の動作を混乱させられる。
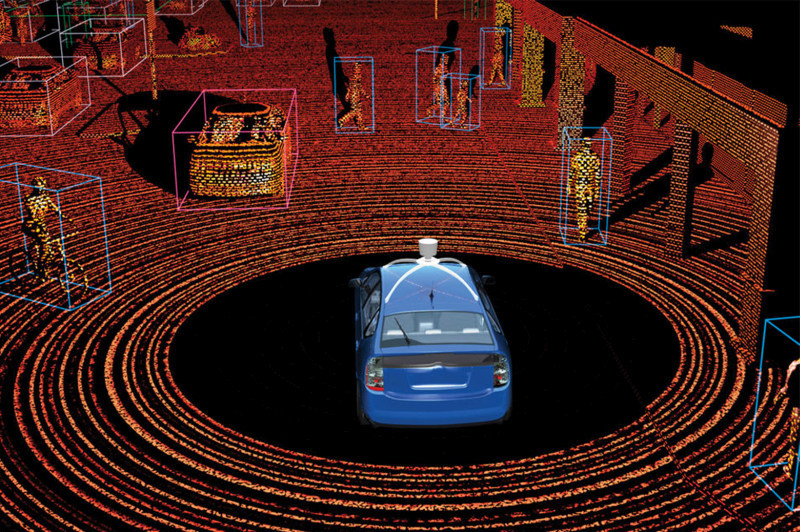
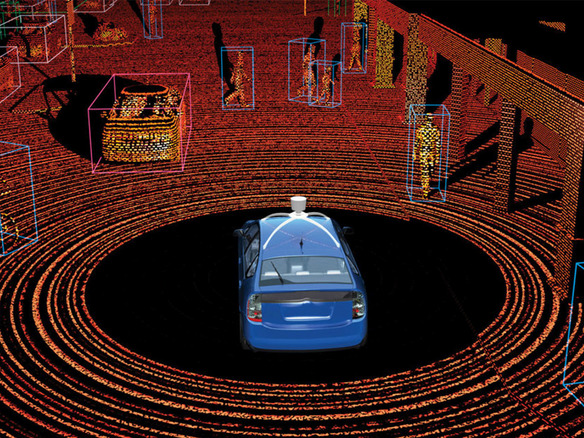
自動運転車は周囲の状況を把握するため、カメラやレーダー、ライダーなど複数のセンサーを搭載している。センサーにはそれぞれ得意、不得意があるため、自動運転車は各センサーで得た情報を組み合わせてどう動くか判断している。たとえば、可視光映像で情報を取得するカメラは、道路標識にステッカーが貼られるなどして改変されるとだまされてしまい、最終的に交通渋滞や事故を起こす可能性があるという。
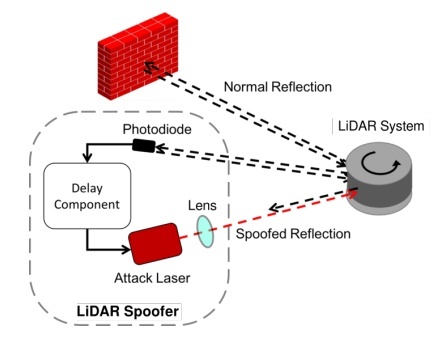
研究チームは、LiDARに偽情報を送り込むため、あるパターンのレーザー光線をLiDARの受光部に照射。こうすることで、実際にはない障害物を、あたかも存在するように誤解させられた。
この手法をシミュレーションしたところ、75%の頻度で攻撃に成功したという。具体的には、必要のない緊急ブレーキをかけさせたり、立ち往生させたりできたそうだ。
研究の紹介ビデオ(出典:ミシガン大学/YouTube)
CNET Japanの記事を毎朝メールでまとめ読み(無料)
 ビジネスの推進には必須!
ビジネスの推進には必須!
ZDNET×マイクロソフトが贈る特別企画
今、必要な戦略的セキュリティとガバナンス
 データ統合のススメ
データ統合のススメ
OMO戦略や小売DXの実現へ
顧客満足度を高めるデータ活用5つの打ち手
 誰でも、かんたん3D空間作成
誰でも、かんたん3D空間作成
企業や自治体、教育機関で再び注目を集める
身近なメタバース活用を実現する
 CES2024で示した未来
CES2024で示した未来
ものづくりの革新と社会課題の解決
ニコンが描く「人と機械が共創する社会」


 シャオミ初のEV「SU7」、MWCに登場
シャオミ初のEV「SU7」、MWCに登場  「Android」スマホのホーム画面を手軽に効率化する5つの方法
「Android」スマホのホーム画面を手軽に効率化する5つの方法  2024年、スマートウォッチはどう変わる?--AI機能強化、デザインも変化か
2024年、スマートウォッチはどう変わる?--AI機能強化、デザインも変化か