「技術を見せたいんです。ロボットは小型化が難しくて、大きさを2分の1にするにはコストが10倍かかると言われている。それを自分たちでやりたいと思ったんです」
そう言ってはにかんだように笑うのは、小型二足歩行ロボット「EMMA-U0A(エマ・ユーゼロエー)」を開発したROBO-Engineの二田政士氏だ。
EMMA-U0Aは全長22cm、重さはわずか850gの小型二足歩行ロボットだ。500mlのペットボトルより少し大きいくらいで、片手で簡単に持ち上げられる。「プロポ」と呼ばれるラジコンのコントローラで操作が可能。23カ所の関節のうち首を除く22カ所を自在に動かし、前後左右に歩くだけでなく、パンチを繰り出したり、倒れても1人で起き上がったりできる。
二田氏は千葉工業大学のロボットサークルで一緒にロボットの研究開発をしていた中野博文氏と、ロボット制作チームであるROBO-Engineを結成。二田氏の自宅である千葉県稲毛区の1Kマンションで、二足歩行ロボットの開発に取り組んでいる。
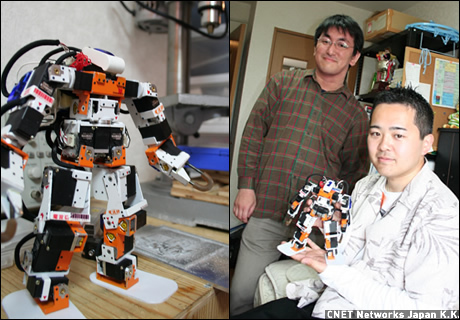 EMMA-U0A(写真左)と開発者したROBO-Engineの中野博文氏(中央)、二田政士氏(右)
EMMA-U0A(写真左)と開発者したROBO-Engineの中野博文氏(中央)、二田政士氏(右)EMMA-U0Aの最大の特徴は、小さくても安定して機敏に動く点にある。同じ大きさのロボットを作ろうとすると、重心が安定せず倒れてしまったり、動きがぷるぷると震えてしまう場合が多いという。これを避けるために、ROBO-Engineではサーボモータと呼ばれる関節を動かすための部品を独自に改造した。本体はすべてアルミ製で、モータをアルミで固定することでモータの熱を体全体で逃がすようにし、モータが発火してしまうのを防いでいる。
ロボットを動作させるプログラムはC言語で書かれることが多いが、ROBO-Engineではアセンブリ言語を使っている。C言語に比べて参考資料が少なく、汎用性が低い難点があるものの、アセンブリ言語の場合、より高い精度でロボットの動きを制御できる。また、すべての関節を異なるスピードで動かすこともでき、ダンスなどの表現力が高まるという。このほか、少ないメモリでロボットを動かせる利点もある。EMMA-U0Aに搭載されているメモリはわずか256バイトだ。
 二田氏の自宅に置かれた切削機械(上)と削りだした部品(下)。「切削機械がうるさくて眠れないので箱を作って入れました」(二田氏)
二田氏の自宅に置かれた切削機械(上)と削りだした部品(下)。「切削機械がうるさくて眠れないので箱を作って入れました」(二田氏)EMMA-U0Aの部品は、すべて汎用品もしくは手作りによるものだ。二田氏の自宅マンションに切削機械を置き、数時間かけて金属を削り出す。本体のボディだけでなく、切削機械の部品までも自分たちで作ってしまう。
「アルミを削り出しているときは、家でご飯は食べれません。作業が終わって、炊飯器でご飯を炊いて蓋を開けたら中が銀色で、何だろうと思って見たらアルミの粉末が浮いていたこともあります。布団に入って何か痛いなぁと思ってみたら、アルミの粉が中に入り込んでいたり(笑)」(二田氏)
ロボットを動かすプログラムを書くアプリケーションも自分たちで作った。表計算ソフトのEXCELをベースにしたもので、それぞれのサーボモータの動作をパラメータを入力して指定する。モーションの形を1つ1つ作って、それをつなげることで一連の動作を実現している。
部品の塗装も自宅で手がける。「塗装をした日はガソリン臭がひどくて眠れません」(二田氏)と苦労は多い。
ROBO-Engineの法人化もこれからで、現在は中野氏が代表、二田氏が技術担当という位置づけだ。現在はアルバイトをしながら生計を立てている状態。それでも二足歩行ロボットを開発するのは、一言でいえば「楽しいから」、そして「ロボットが好き」だからだ。
CNET Japanの記事を毎朝メールでまとめ読み(無料)
 CES2024で示した未来
CES2024で示した未来
ものづくりの革新と社会課題の解決
ニコンが描く「人と機械が共創する社会」
 誰でも、かんたん3D空間作成
誰でも、かんたん3D空間作成
企業や自治体、教育機関で再び注目を集める
身近なメタバース活用を実現する
 ビジネスの推進には必須!
ビジネスの推進には必須!
ZDNET×マイクロソフトが贈る特別企画
今、必要な戦略的セキュリティとガバナンス
 脱炭素のために”家”ができること
脱炭素のために”家”ができること
パナソニックのV2H蓄電システムで創る
エコなのに快適な未来の住宅環境


 シャオミ初のEV「SU7」、MWCに登場
シャオミ初のEV「SU7」、MWCに登場  注目集めた指輪型にEV、「主役」はスマホからAIへ--MWC Barcelona 2024振り返り、日本企業は存在感高められるか
注目集めた指輪型にEV、「主役」はスマホからAIへ--MWC Barcelona 2024振り返り、日本企業は存在感高められるか  写真で見る「Ai Pin」--手のひらに投影できるウェアラブルAIデバイス
写真で見る「Ai Pin」--手のひらに投影できるウェアラブルAIデバイス