
Googleは、物をつかむ機能を備えるロボットに深層畳み込みニューラルネットワーク(Convolutional Neural Network:CNN)を応用し、上手なつかみ方を自律的に学習していく実験を実施した。人間が介在せずロボットに試行錯誤させることで、当初34%あった失敗率を18%まで“ロボット自ら”下げることができた。
ロボットの性能は以前と比べ飛躍的に進歩しているが、センサとモーターを組み合わせて物をつかむ簡単な動作でさえ、人間の技能レベルにはまだまだ到達できないという。このレベル差を縮める手法として、Googleはフィードバックと制御を連続的に実行させ、それを機械学習と連携させる取り組みを試験した。
Googleは、カメラの画像データを見て物をつかむようにプログラムしたロボットを用意し、つかむことに失敗しても人間が動作を正すのではなく、試行結果に応じて動きを自動修正するよう設定した。さらに、複数のロボットに同様の取り組みを実行させ、学習結果を相互に交換できるようにしておいた。
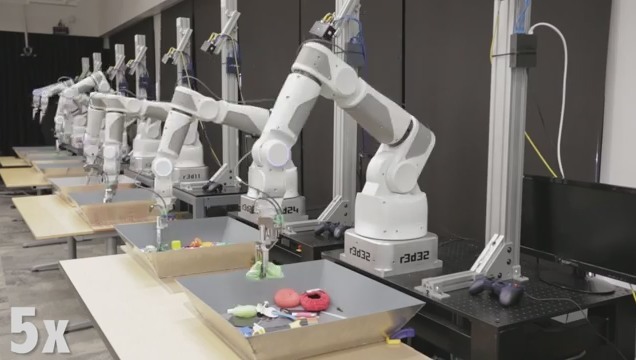
“練習”を始めたロボットたち(出典:Google)
実験を始めたばかりの段階では失敗ばかりしてうまく物をつかめなかったが、“練習”を続けるに従い「手と目の連携」が進み、成功率が上昇したそうだ。
つかみ方に“工夫”が見られるようになってきた(出典:Google)
約3000時間の練習をさせ、試行回数が80万回を超えた段階で、「知性的な受動的行動の芽生えが見られた」としている。そして、失敗率を34%から18%まで下げられた。
初期のつかみ方が下手だった状態(出典:Google)
上達したロボット(出典:Google)
Googleは、機械学習(マシンラーニング)システム用ツールキット「TensorFlow」を通じて深層学習(ディープラーニング)の研究に取り組み、画像やテキスト、音声の自動認識といった分野でさまざまな成果を上げてきた。機械の自動制御は難易度が高いものの、大規模な機械学習をロボット制御に適用できれば、ロボットおよび自動制御の根本的な問題解決に1歩近づけると見込む。
なお、マサチューセッツ工科大学(MIT)もロボットの相互学習技術に注目している。2016年版の革新技術リスト「10 Breakthrough Technologies 2016」で取り上げ、3年から5年後に実用化されると予想した。

CNET Japanの記事を毎朝メールでまとめ読み(無料)
 脱炭素のために”家”ができること
脱炭素のために”家”ができること
パナソニックのV2H蓄電システムで創る
エコなのに快適な未来の住宅環境
 データ統合のススメ
データ統合のススメ
OMO戦略や小売DXの実現へ
顧客満足度を高めるデータ活用5つの打ち手
 誰でも、かんたん3D空間作成
誰でも、かんたん3D空間作成
企業や自治体、教育機関で再び注目を集める
身近なメタバース活用を実現する
 CES2024で示した未来
CES2024で示した未来
ものづくりの革新と社会課題の解決
ニコンが描く「人と機械が共創する社会」


 2024年、スマートウォッチはどう変わる?--AI機能強化、デザインも変化か
2024年、スマートウォッチはどう変わる?--AI機能強化、デザインも変化か .jpeg) 存在しないはずの「ターミナル0」が羽田に出現、なぜ?--異業種連携で「未来の空港」を研究開発へ
存在しないはずの「ターミナル0」が羽田に出現、なぜ?--異業種連携で「未来の空港」を研究開発へ  シャオミ初のEV「SU7」、MWCに登場
シャオミ初のEV「SU7」、MWCに登場