スイスのユニークな研究チームが、見事な離れ業を複数こなすシンプルな「アリ」ロボット群を開発した。安価に製造でき、設計が驚くほどにシンプルなこれらの10gのロボットの重要な点は、「チームワークが夢をかなえる」ということだ。
英科学誌「Nature」に掲載された新たな論文に記されているように、このロボットは互いに伝達し合い、自分たちの間で役割を割り当て、協力して複雑なタスクを完了して障害を克服する。ゆえに、はるかに複雑な自律エージェントに比べてシンプルでありながら、折り紙を思わせるこれらのロボットは、段差のある表面を進んだり、比較的大きな物体を動かしたりといった複雑な難題を解決できる。
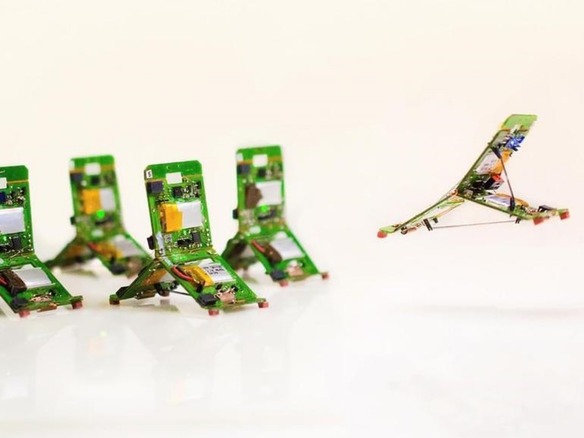
スイス連邦工科大学ローザンヌ校(EPFL)の研究者らが「Tribot」と呼んでいるこのT字型ロボットは、赤外線センサーと近接センサーを使って検知や伝達を行う。折りたたみ可能な薄い素材でできていて、製造も容易だ。駆動中はジャンプやほふくによって段差のある表面を進むことができる。
「ロボットの動作はアギトアリの動きをモデルにしている」と、Natureに掲載された論文の主執筆者であるZhenishbek Zhakypov氏は述べ、「アギトアリは通常はって進むが、捕食動物から逃れるために強力な顎をかみ合わせ、その反動によって葉から葉へジャンプする」とした。
Tribotは、複数の形状記憶合金アクチュエーターを組み合わせた折り紙のような設計を通じて同様の動作を行う。これらのアクチュエーターにより、ロボット単体がジャンプのほかにほふくや回転をすることもできる。
だが真に優れたところはハードウェアではない。むしろ、自律ロボットが見せる連携だ。タスクの実行中、それぞれのロボットに個別の役割が割り当てられる。例えば、探査を任されたロボットらが物体や空洞などの物理的な障害を検知したとする。それらのロボットが他のロボットにその情報を伝達し、リーダーを割り当てられたロボットが作業ロボットらに指示を出し、連携して力を出し合う。
「まさにアギトアリのように、それぞれのロボットに異なる役割がある。だが新たなミッションや未知の環境に直面した場合や他のロボットが方向を見失った場合は、瞬時に新たな役割をこなすことができる。これは本物のアギトアリを超越した能力だ」とEPFLのJamie Paik教授は述べる。
スワーム(群)ロボティクスは急成長している分野で、製造から戦闘に至るあらゆるものに応用できる可能性を秘めている。Tribotは個別の役割を明確にすることによってスワームの一歩先を行き、有益なロボットコロニーを形成する。Paik教授は捜索救助活動がユースケースになりえると考えている。
「Tribotは大量に製造や配備が可能なため、ミッションの過程で数台が『犠牲』になったとしても成功にはさほど影響しないだろう」とPaik教授は述べ、「類いまれな集団知能を備えているわれわれの小さなロボットらは、未知の環境に適応する装備が以前よりも整っている。ゆえに、特定のミッションでより大きく強力なロボットをしのぐ可能性がある」とした。
この記事は海外CBS Interactive発の記事を朝日インタラクティブが日本向けに編集したものです。
CNET Japanの記事を毎朝メールでまとめ読み(無料)
 ビジネスの推進には必須!
ビジネスの推進には必須!
ZDNET×マイクロソフトが贈る特別企画
今、必要な戦略的セキュリティとガバナンス
 脱炭素のために”家”ができること
脱炭素のために”家”ができること
パナソニックのV2H蓄電システムで創る
エコなのに快適な未来の住宅環境
 誰でも、かんたん3D空間作成
誰でも、かんたん3D空間作成
企業や自治体、教育機関で再び注目を集める
身近なメタバース活用を実現する
 CES2024で示した未来
CES2024で示した未来
ものづくりの革新と社会課題の解決
ニコンが描く「人と機械が共創する社会」


 「ストリートビュー」が捉えたクレイジーすぎる光景38連発
「ストリートビュー」が捉えたクレイジーすぎる光景38連発  「Android」スマホのホーム画面を手軽に効率化する5つの方法
「Android」スマホのホーム画面を手軽に効率化する5つの方法 .jpeg) 存在しないはずの「ターミナル0」が羽田に出現、なぜ?--異業種連携で「未来の空港」を研究開発へ
存在しないはずの「ターミナル0」が羽田に出現、なぜ?--異業種連携で「未来の空港」を研究開発へ