マサチューセッツ工科大学(MIT)コンピュータ科学および人工知能研究所(CSAIL)の研究チームは、地表を走行できるクアッドコプター型ドローンを開発した。自律ナビゲーションシステムを搭載し、障害物を自動的に回避しながらスタート地点から目的地まで自律移動できる。
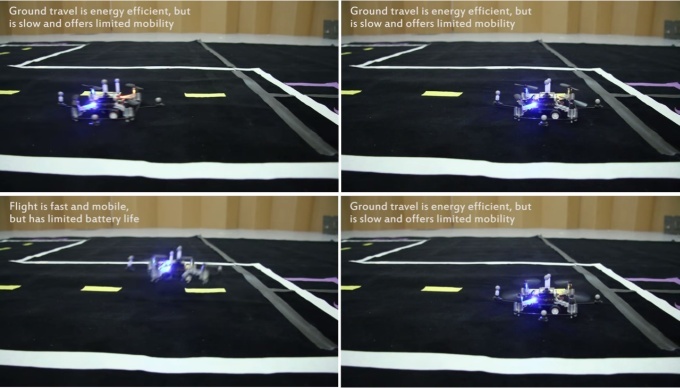
何らかの移動能力を持つロボットは、必ずしも万能でなく、移動方式によって得手不得手がある。例えば、空を飛ぶドローンは高速移動が可能で移動ルートの自由が高い一方、バッテリ駆動時間に制約があり、長距離の移動には向かない。また、地表を走る自動車型ロボットはエネルギー効率が高く遠くまで移動できるが、速度は遅く機動性に欠ける。
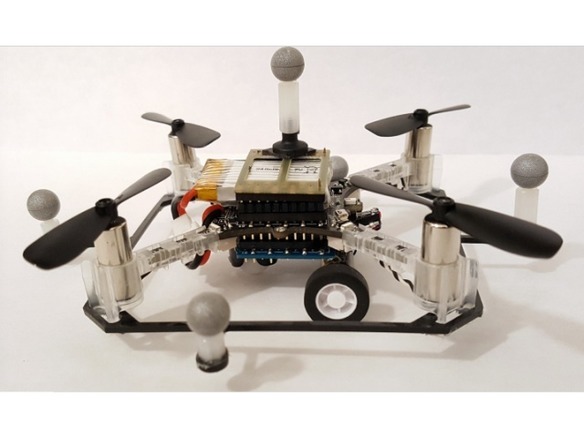
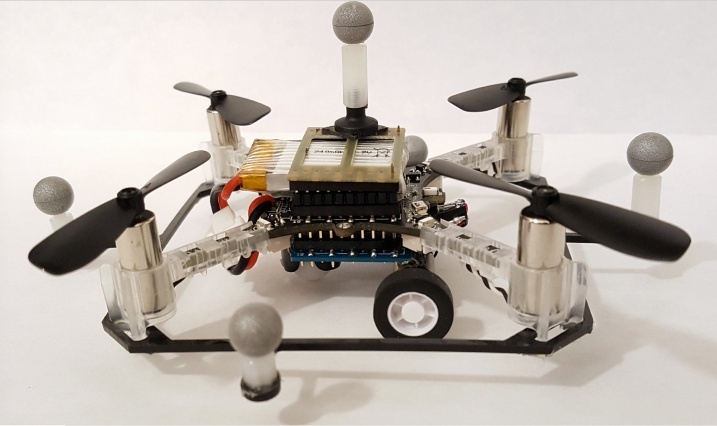
そこでMITの研究チームは、クアッドコプターの下部に小型モーター2つとタイヤを取り付け、地上走行も可能なドローンを開発。シミュレーション結果によると、フル充電したバッテリで飛行距離は90m、走行距離は252mになるという。走行用のモジュールを追加したため飛行距離は追加前に比べ14%短くなってしまうが、地表走行と組み合わせるとバッテリ効率は問題になるほど低下しないそうだ。
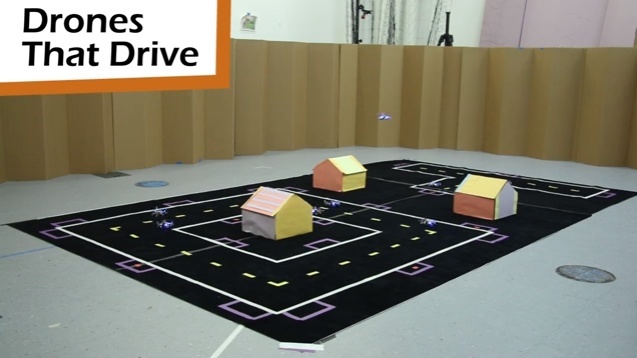
このドローンは障害物を避けながら移動する機能も備え、建物や道路、駐車場、飛行禁止地区、着陸エリアなどを含む市街地のような試験ルートを自律移動できた。研究チームは、このドローンが飛ぶことも走ることもできるため、障害物の多い環境でも飛び越えたり、逆に障害物の下をくぐったりして、効率的に移動可能としている。
今回開発したドローンは試験的なもので、人間を乗せられるほど強力かつ大型のモデルを実現させるには高いハードルがあるという。ただし、さまざまな条件下で最適な移動手段を選べるため、人命救助など多彩な応用が考えられる。
CNET Japanの記事を毎朝メールでまとめ読み(無料)
 ビジネスの推進には必須!
ビジネスの推進には必須!
ZDNET×マイクロソフトが贈る特別企画
今、必要な戦略的セキュリティとガバナンス
 CES2024で示した未来
CES2024で示した未来
ものづくりの革新と社会課題の解決
ニコンが描く「人と機械が共創する社会」
 脱炭素のために”家”ができること
脱炭素のために”家”ができること
パナソニックのV2H蓄電システムで創る
エコなのに快適な未来の住宅環境
 データ統合のススメ
データ統合のススメ
OMO戦略や小売DXの実現へ
顧客満足度を高めるデータ活用5つの打ち手


 2024年、スマートウォッチはどう変わる?--AI機能強化、デザインも変化か
2024年、スマートウォッチはどう変わる?--AI機能強化、デザインも変化か  レトロかわいいAIデバイス「rabbit r1」を体験--新たなトレンドを作れるか?
レトロかわいいAIデバイス「rabbit r1」を体験--新たなトレンドを作れるか? .jpeg) 存在しないはずの「ターミナル0」が羽田に出現、なぜ?--異業種連携で「未来の空港」を研究開発へ
存在しないはずの「ターミナル0」が羽田に出現、なぜ?--異業種連携で「未来の空港」を研究開発へ